●メカナム走行機能の机上テスト
はじめに・・・ ロボコン競技をテレビで観ていると … タイヤ走行で小回りが利く車体を発見しました。 それは、「 メカナムホイール 」を用いた作品系で、これらの仕掛けに興味深々です。 車体の向きを変えずに、全方向に移動可能な特殊車輪で各車輪のモータ制御を要します。 戦車のように、段差を乗り越えるなどのキャタピラ走行の真似は難しいようですが、 興味深い「 メカナムホイール 」を想定しながらのテストを行うことにしました。
→ このホイールは、ドレッドヘア系なのかしら (^^?
・ ・ ・ ・ ・
●配線図です。……… クリックすれば、拡大します。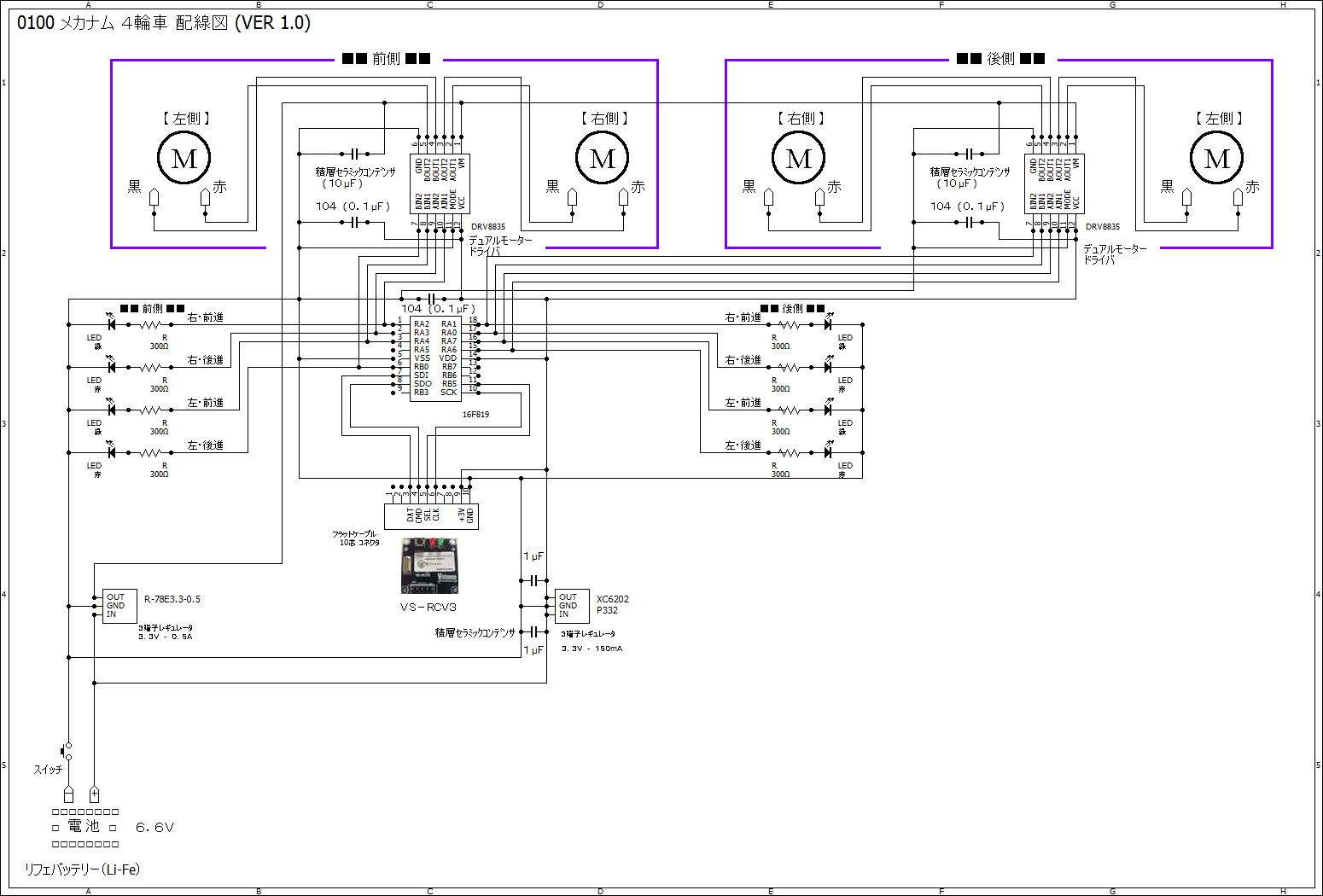
●メカナムホイールの動き ( 回転方向 )を、モニタリングしたいので ……… 個々のホイールに対して、回転方向 ( 点灯 ) LEDを装備しました。 ■LED ( 2色 )の点灯状況により、視覚的に確認できるようにしました。 ・【 緑 】 : < 前進 > 回転している場合のみ、LEDが点灯する。 ・【 赤 】 : < 後進 > 回転している場合のみ、LEDが点灯する。 * ホイールが回転しない状態であれば、該当のLEDは、消灯しています。 ( 参考 ) 1モータに対して、2線の信号より回転状況を判断します。 PWM信号 : '1' の 時 ………… [ 逆転 ] 方向に回転している。 回転方向信号 : '1' の 時 ………… [ 正転 ] 方向に回転している。
・ ・ ・ ・ ・
●使用する「 ギヤボックス 」です。 前進後進、左右旋回をコントロールするギヤは、試行する上で、動作確認しやすいように 最低速ギヤ比( 344.2 : 1 )のギヤボックスを使用する事にしました。 【 タミヤのダブルギヤボックス( 左右独立4速タイプ )】
・低消費電流( 450mA )の低回転型130モーターを使用します。 ・出力シャフトは、タミヤの工作シリーズ共通「 3mm径 六角 」タイプです。
・ ・ ------ 第 1 段階 ------ ・ ・ 【 通常操作モード 】の構築 ・
●全方向に移動走行できる特殊な車輪 ( メカナムホイール )ですが ……… まずは、4WD車のような通常の「4輪独立駆動走行」機能を構築することにしました。
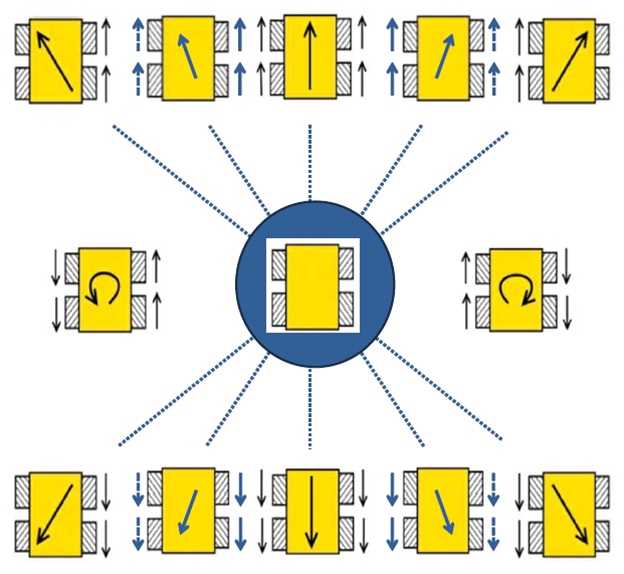
●通常走行イメージ …… 前進・後進・旋回・信地旋回・超信地旋回
●通常走行の「 メカナムホイールの動き(回転方向)」について ・前輪の動き(回転方向)を基点とし、 同じ側面の車輪(前輪と後輪)を、1つの擬似的キャタピラとして考える。 ・前輪側の駆動(回転方向)動作を、後輪側にも同じ駆動(回転方向)動作をさせる。
●通常走行のステイック操作イメージ
●ステイックとボタンの使い方です。 ------------------------------------------------------------------------------ ・アクセル・ギヤ ………………【左側】ステイック ・前 進 : 上方向 ・停 止 : 中央 【 ニュートラル 】 ・後 進 : 下方向 ------------------------------------------------------------------------------ ・ステアリング …………………【右側】ステイック ・(右)超信地旋回 : 右方向 (最右端) ・(右)信地旋回 : 右方向 ・(右)旋回 : 右方向 ・直 進 : 中央 【 ニュートラル 】 ・(左)旋回 : 左方向 ・(左)信地旋回 : 左方向 ・(左)超信地旋回 : 左方向 (最左端) ------------------------------------------------------------------------------ ・自動走行 ………………………【前側】ボタン ・前進【自動】(ON) : L1 ボタン……(左) ・後進【自動】(ON) : L2 ボタン……(左) ・走行【自動】(OFF): R1 ボタン……(右) OR R2 ボタン……(右) ------------------------------------------------------------------------------
●メカナムホイール4輪 操作指示エリア( スティツク情報 )仕切値設定です。 【 通常操作モード 】試行① ……… クリックすれば、拡大します。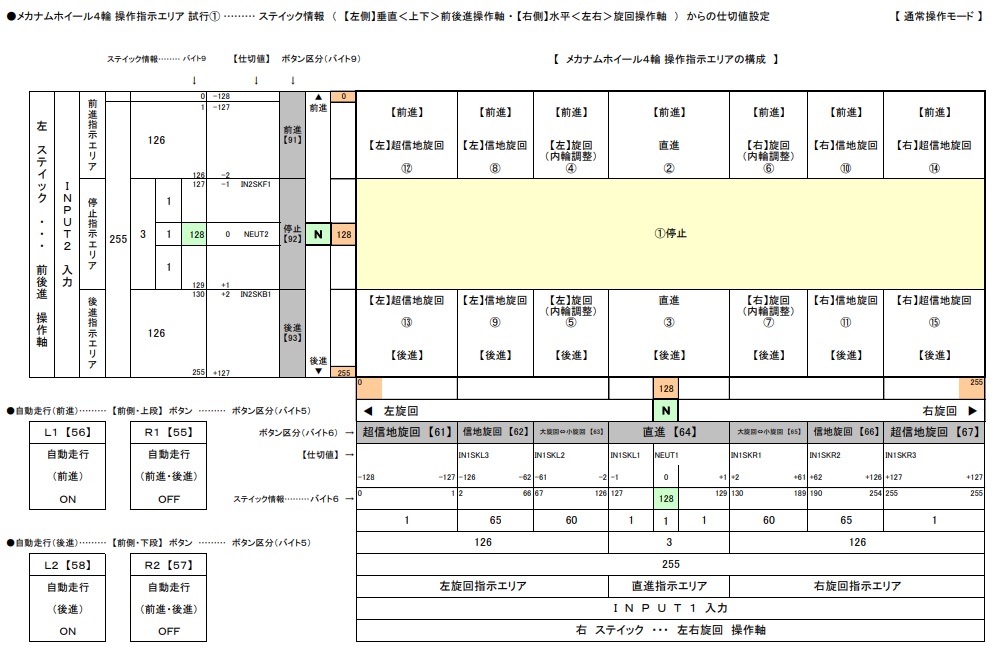
●【通常】操作モード 出力ポート表です。……… クリックすれば、拡大します。
●プログラム:MENUM4WDTES01( VER 0100 ) *VSC3DMD09をベースにして作成しました。 ・メカナム用として、【 通常 】操作モード機能のみ設定した。 停止・前進・後進・旋回・信地旋回・超信地旋回
●通常走行イメージ ……… 「 メカナムホイールの動き ( 回転方向 ) 」の確認です。 ( 前進 ・ 後進 ・ 旋回 ・ 信地旋回 ・ 超信地旋回 )
→ 机上での【 通常 】 操作モードの動作確認OKです。
・ ・ ------ 第 2 段階 ------ ・ ・ 【 メカナム操作モード 】の構築 ・
●通常走行での動作が、なんとなく、できましたので ……… 新たな操作モードでの「 メカナム走行 」機能を追加することにしました。 【 メカナム操作モード 】 への切替えは、コントローラのボタンで行います。
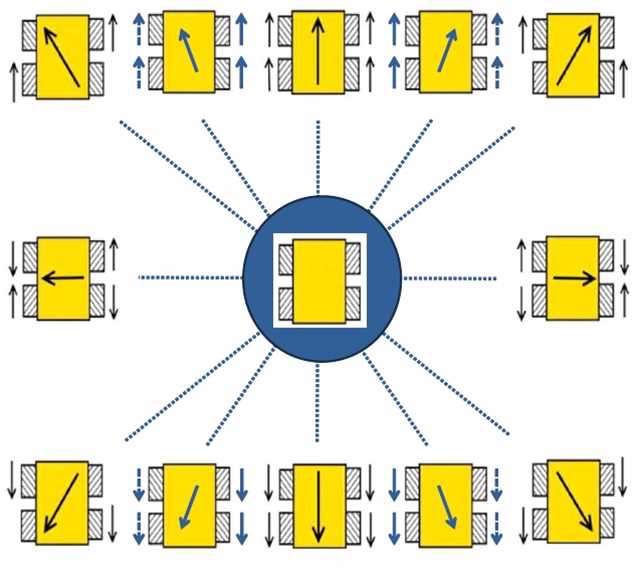
●メカナム走行イメージ ……… ( 前後 ・ 左右 ・ 斜め ) 移動 ・ 旋回
●メカナム走行の「 メカナムホイールの動き(回転方向)」について ・前輪の動き(回転方向)を基点とする。 ・反対側面の対角位置にある車輪(前輪と後輪)の2輪を連動させる方法により、 前輪側の駆動(回転方向)動作を、後輪側にも同じ駆動(回転方向)動作をさせる。
●メカナム走行のステイック操作イメージ ------------------------------------------------------------------------------ ■メカナム操作モードの切替え方法 ・メカナム操作 (適用) ON する場合 ……【左側】 ボタン を 押下する。 ← 、↓、→、↑ ・メカナム操作 (解除) ON する場合 ……【右側】 ボタン を 押下する。 □ 、X、○、△ ------------------------------------------------------------------------------
------------------------------------------------------------------------------ ■メカナム操作モード【適用】の場合、以下のアクション(ステアリング)をする。 ・ステアリング .............【右側】スティック ・(右)平行 : 右方向 (最右端) ・(右)斜め : 右方向 ・(右)旋回 : 右方向 ・直 進 : 中央 【 ニュートラル 】 ・(左)旋回 : 左方向 ・(左)斜め : 左方向 ・(左)平行 : 左方向 (最左端) ------------------------------------------------------------------------------
●メカナムホイール4輪 操作指示エリア( スティツク情報 )仕切値設定です。 【 メカナム操作モード 】試行① ……… クリックすれば、拡大します。
●【メカナム】操作モード 出力ポート表です。……… クリックすれば、拡大します。
●プログラム:MENUM4WDTES02( VER 0200 ) ・【 メカナム 】操作モードを追加 … 停止・前進・後進・旋回・斜め移動・平行移動
●メカナム走行イメージ …… 「 メカナムホイールの動き (回転方向) 」の確認です。 ( 前後 ・ 左右 ・ 斜め ) 移動
→ 机上での 【 メカナム 】 操作モードの動作確認OKです。
・ ・ ・ ・ ・
●感想 4WD車のような通常の「 4輪独立駆動走行 」機能と「 メカナム走行 」機能の仕様 に準じた「 メカナムホイール 」を想定しての動き ( 回転方向 )を、机上で確認が できました。
→ 実際に、「 メカナムホイール 」 を装着したら、どうなるのかしら ?
・ ・ ・ ・ ・