�����J�i��4�֓Ɨ��쓮�̎����@
�͂��߂ɁE�E�E �u4�֓Ɨ��쓮���s�v�A�u���J�i�����s�v�@�\�ł̎ԗ։�]������m�F�ł��܂����̂� ���s➑̂ɁA�u ���J�i���z�C�[�� �v�����A���s�v���O�����ł̊���������� �S�����Ɉړ����s�ł�������́u ���J�i��4�֓Ɨ��쓮�� �v����邱�Ƃɂ��܂����B
�E �E �E �E �E
���g�p����u ���J�i���z�C�[�� �v�ł��B �y 48mm�X�`�[�����J�i���z�C�[�� ( �E�F2�A���F2�� ) �z Nexus robot
�i���i�d�l�j �@�@�E���a �F 48mm �@�@�E�� �F 25.5mm �@�@�E�����a �F 9mm �@�@�E�d�� �F ��56g�~4 �@�@�E1������̕�����F 1kg �@�@�E4�g�p���̕�����F 3kg �@�@�E���[���[�� �F 8 �@�@�E���[���[�̍ގ� �F TPR �@�@�E�v���[�g���� �F 2 �@�@�E�v���[�g�̍ގ� �F �X�`�[��
���g�p����u ���J�i���z�C�[���p�̃n�u �v�ł��B �y 48mm�X�`�[�����J�i���z�C�[���p3mm�n�u (18076) 4�� �z Nexus robot
�@���@�M���{�b�N�X�̏o�̓V���t�g���a�i 3mm �j�ɍ��킹�܂����B
�E �E �E �E �E
���u ���J�i���z�C�[�� �v���A���t�����܂����B�c�c '�ւ�Ă�' �� �ԗւł��� (^^�G
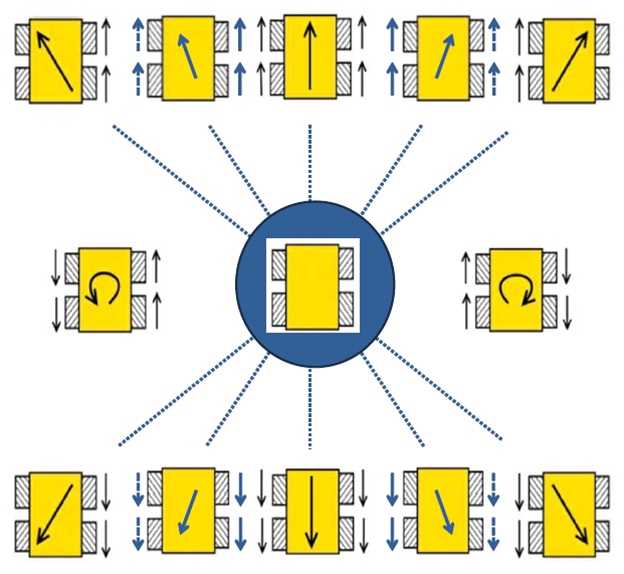
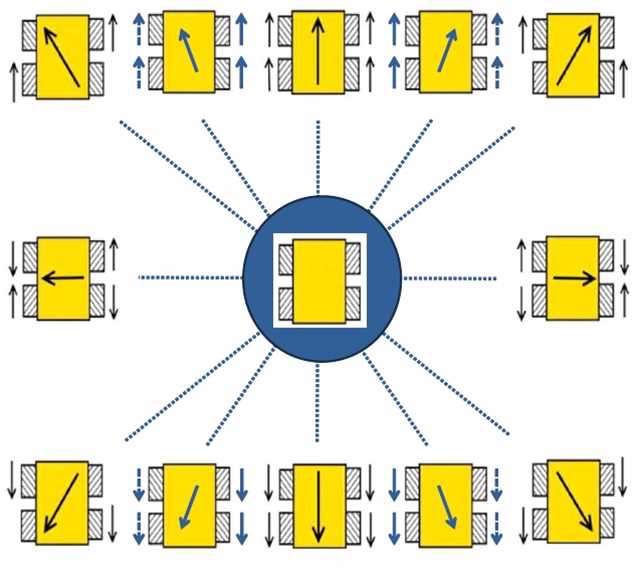
�����J�i���z�C�[���́u �����|�W�V���� �v�ɂ��� �E�z�C�[���p�^�[���́A�Q��ށi ���p�E�E�p �j����܂��̂� �c�c�c �@�Y���̃|�W�V�����ɁA���ꂼ��̃z�C�[��������K�v������܂��B �E�ԑ̂��ォ�猩�Ă����Ԃ� �c�c�c �e�z�C�[���̑����|�W�V������ �H �@�z�C�[�������̃��[���[�����A�ԑ̂̒��S�����p�^�[���̃z�C�[�������܂��B
�E �E �E �E �E
���z���}�ł��B�c�c�c�@�N���b�N����A�g�債�܂��B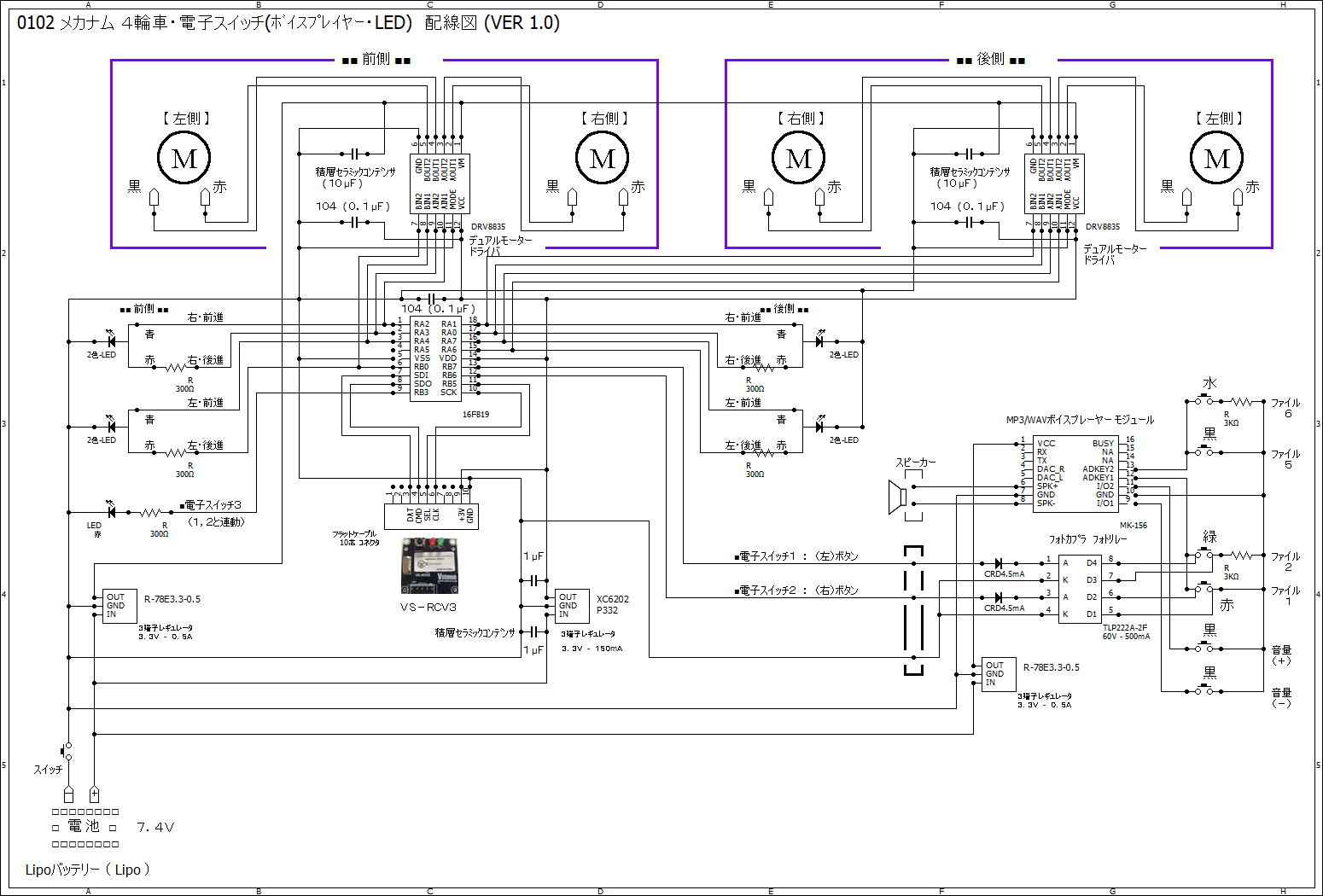
�E �E �E�@�@�@�@�|�|�|�|�|�|�@�ʏ푖�s�̎d�l�@�|�|�|�|�|�| �E �E
���ʏ푖�s�C���[�W �c�c �O�i�E��i�E����E�M�n����E���M�n����
���ʏ푖�s�̃X�e�C�b�N����C���[�W
���ʏ푖�s�̃X�e�C�b�N�ƃ{�^���̎g�����ł��B ------------------------------------------------------------------------------ �@�E�A�N�Z���E�M���@�c�c�c�c�c�c�y�����z�X�e�C�b�N �@�@�@�E�O�@�i�@�@�@�@�F�@����� �@�@�@�E��@�~�@�@�@�@�F�@���� �y �j���[�g���� �z �@�@�@�E��@�i�@�@�@�@�F�@������ ------------------------------------------------------------------------------ �@�E�X�e�A�����O�@�c�c�c�c�c�c�c�y�E���z�X�e�C�b�N �@�@�@�E�i�E�j���M�n����@�F�@�E���� �i�ʼnE�[�j �@�@�@�E�i�E�j�M�n����@�@�F�@�E���� �@�@�@�E�i�E�j����@�@�@�@�F�@�E���� �@�@�@�E���@�i�@�@�@�@�@�@�F�@���� �y �j���[�g���� �z �@�@�@�E�i���j����@�@�@�@�F�@������ �@�@�@�E�i���j�M�n����@�@�F�@������ �@�@�@�E�i���j���M�n����@�F�@������ �i�ō��[�j ------------------------------------------------------------------------------ �@�E�������s�@�c�c�c�c�c�c�c�c�c�y�O���z�{�^�� �@�@�@�E�O�i�y�����z�i�n�m�j�@�F�@�k�P �{�^���c�c�i���j �@�@�@�E��i�y�����z�i�n�m�j�@�F�@�k�Q �{�^���c�c�i���j �@�@�@�E���s�y�����z�i�n�e�e�j�F�@�q�P �{�^���c�c�i�E�j OR �q�Q �{�^���c�c�i�E�j ------------------------------------------------------------------------------ �@�E�M�~�b�N �@�@�@�E���J�i������ (�K�p) �n�m �F�y�����z�{�^�� �c�c�c�i �� �A���A���A�� �j �@�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@���A�����āA���J�i���N���y���z���i�n�m�j�ɂȂ�B �@�@�@�E���J�i������ (����) �n�m �F�y�E���z�{�^�� �c�c�c�i �� �A�w�A���A�� �j �@�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@���A�����āA���J�i����~�y���z���i�n�m�j�ɂȂ�B ------------------------------------------------------------------------------
������w���G���A�i �X�e�B�c�N��� �j�d�ؒl�ݒ�ł��B �y �ʏ푀�샂�[�h �z �c�c�c �N���b�N����A�g�債�܂��B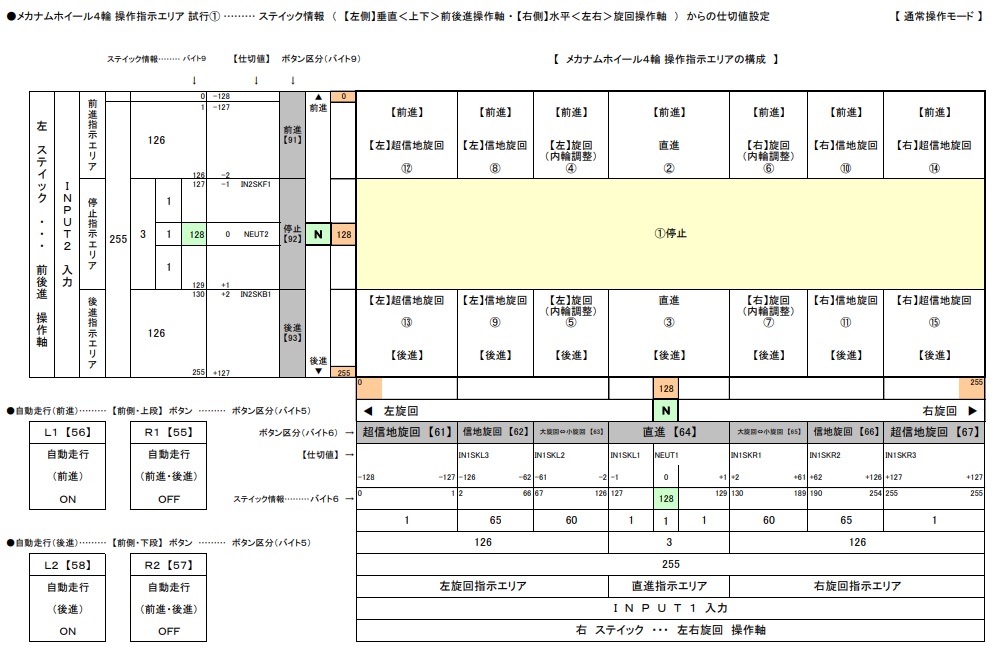
�E �E�@�@�@�@�@�@�|�|�|�|�|�|�@���J�i�����s�̎d�l�@�|�|�|�|�|�| �E �E �E�@�y ���J�i�����샂�[�h �z �ւ̐ؑւ��́A�R���g���[���̃{�^���ōs���܂��B
�����J�i�����s�C���[�W �c�c�c �i �O�� �E ���E �E �� �j �ړ� �E ����
�����J�i�����s�̃X�e�C�b�N����C���[�W ------------------------------------------------------------------------------ �@�����J�i�����샂�[�h�̐ؑւ����@ �@�@�E���J�i������ (�K�p) �n�m ����ꍇ �c�c�y�����z �{�^�� �� ��������B �@�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@�� �A���A���A�� �@�@�E���J�i������ (����) �n�m ����ꍇ �c�c�y�E���z �{�^�� �� ��������B �@�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@�� �A�w�A���A�� ------------------------------------------------------------------------------
------------------------------------------------------------------------------ �@�����J�i�����샂�[�h�y�K�p�z�̏ꍇ�A�ȉ��̃A�N�V����(�X�e�A�����O)������B �@�@�E�X�e�A�����O .............�y�E���z�X�e�B�b�N �@�@�@�@�E(�E)���s�@�@:�@�E���� (�ʼnE�[) �@�@�@�@�E(�E)�߁@�@:�@�E���� �@�@�@�@�E(�E)����@�@:�@�E���� �@�@�@�@�E���@�i�@�@ �F�@���� �y �j���[�g���� �z �@�@�@�@�E(��)����@�@:�@������ �@�@�@�@�E(��)�߁@�@:�@������ �@�@�@�@�E(��)���s�@�@:�@������ (�ō��[) ------------------------------------------------------------------------------
������w���G���A�i �X�e�B�c�N��� �j�d�ؒl�ݒ�ł��B �y ���J�i�����샂�[�h �z �c�c�c �N���b�N����A�g�債�܂��B
�E �E �E�@ �E �E
���S�̂̔z�u�ƌ����ł��B �c�c�c �N���b�N����A�g�債�܂��B�@���@�����m�F���Ȃ���z�u���܂��̂ŁA�����Ⴒ����'�ɂȂ肻���ł��B(^^;
���d��(3�n��)�̔z�u�ƌ����ł��B �c�c�c �N���b�N����A�g�債�܂��B�@���@���[�^�n�ƃ��W�b�N�n�Ԃ�GND�ڑ��ɂ��A�u��̓d�ʓ_�v�͓����ł��B
�E �E �E �E �E
�������v���O�����̍쐬�ł��B ;******************************************************************************* ;* ���v���O���� �F �l�d�m�t�l�S�v�c�O�P�@(VER 01.00) �@�@�@�@�@�@�@ ;* �@���J�i���i�S�֓Ɨ��쓮�j�̎����Ň@ ;******************************************************************************* ; ���l�d�m�t�l�S�v�c�s�d�r�O�Q���x�[�X�ɂ��Ă̍쐬�ł��B �@�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@ �@�@ ;******************************************************************************* ;�y �ʁ@�@�� �z���샂�[�h �c�c ��~�E�O�i�E��i�E����E�M�n����E���M�n���� ;�y ���J�i�� �z���샂�[�h �c�c ��~�E�O�i�E��i�E����E�߈ړ��E���s�ړ� ;------------------------------------------------------------------------------- ;���d���d���F�R�D�R�u�@�������N���b�N �F �S�l�g���@�i �r�b�j�N���b�N �F �Q�T�O�j ; ; �y PIC16F819 �z�i�}�X�^���[�h�j�i�r�o�h���[�h�F�R ; ___________________ __________ ; | V | ���F�r�o ; | | ; (�O)�E IN1 ��]���� <-+ 1 RA2 PORTA(BIT2) | RA1 18 +-> (��)�E IN2 �o�v�l ; (�O)�E IN2 �o�v�l�@ <-+ 2 RA3 PORTA(BIT3) | RA0 17 +-> (��)�E IN1 ��]���� ; (�O)�� IN1 ��]���� <-+ 3 RA4 PORTA(BIT4) | RA7 16 +-> (��)�� IN2 �o�v�l ; -+ 4 RA5 PORTA(BIT5) | RA6 15 +-> (��)�� IN1 ��]���� ; 0V -+ 5 Vss (-) | Vdd 14 +- 3�`5V+ ; (�O)�� IN2 �o�v�l�@ <-+ 6 RB0 PORTB(BIT0) | RB7 13 +-> �d�q�X�C�b�`�P ; DAT-->�ر��ް��E�� >-+ 7 SDI��PORTB(BIT1) | RB6 12 +-> �d�q�X�C�b�`�Q ; CMD<--�ر��ް��E��� <-+ 8 SDO��PORTB(BIT2) | RB5��11 +-> �ڰ�ڸ�-->SS ;�@ �d�q�X�C�b�`�R <-+ 9 RB3 PORTB(BIT3) | SCK��10 +-> �رٸۯ�--->CLK ; | | ; +-----------------------------+ ; ;*******************************************************************************
�E �E�@�X�s�[�J�[���特���o�͂��Ă݂����̂� �c�c�c �E �E�@�@�l�o�R�v���[���[�n���g�p���邱�Ƃɂ��܂����B �E
��MP3�v���[���[�� �c�c �{��(���W���[��)�̂ݍw�����܂����B �y �H���d�q�ʏ� DFPlayer mini ( MP3�v���[���[ ) �z
�@���@DFRobot �� Arduino ( �A���h�D�C�[�m )�ɐڑ����Ďg�p����Ă���悤�ł��B
��microSD�������[�J�[�h�ɋL��������́i�P�S�ȁj �@�|�`�c�j�d�x�P�n�| �@�@�E�t�@�C���P�@�@�F ���J�i�����[�h��~ �@�@�E�t�@�C���Q�@�@�F ���J�i�����[�h�N�� �@�|�`�c�j�d�x�Q�n�| �@�@�E�t�@�C���T�@�@�F �~�b�L�[���O���X���s �@�@�E�t�@�C���U�@�@�F �G���N�g���J�� �p���[�h�E�h���[�����C�c ���s �@�����́A�_�~�[�i�����j���L������B�c�@�t�@�C���R�A�S�A�V�`�P�S -------------------------------------------------------------------------------- �@�E�{�^���G���A �@�@�@���F�@�F�y �p���[�h �z�c�c�c �t�@�C���U �@�i�R�����j �@�@�A���F�@�F�y ���O���X �z�c�c�c �t�@�C���T �@�i�O���j �@�@�B�ΐF�@�F�y �N�� �z�c�c�c�c�c �t�@�C���Q �i�R�����j �@�@�C�ԐF�@�F�y ��~ �z�c�c�c�c�c �t�@�C���P �i�O���j �@�@�D���F�@�F�y �u�n�k�i�{�j�z �@�@�E���F�@�F�y �u�n�k�i�|�j�z --------------------------------------------------------------------------------
�E �E �E�@���ԑ̂̊�{���������܂��B �E �E
��������܂�悤�ɃJ�b�g���āA�z�u���Ă݂܂����B
�@���@�K���ȑ傫���ł��� �c�c�c �g���Ɋe�d�q���i�������ł��邩����(^^?
���ݒu�X�y�[�X�� �c�c�c 3�i ( �ʼn��i�E�����i�E�ŏ�i ) �t���A�̍\���ɂ��܂����B
�E �E �E ���������ʓI�ȁABGM��炵�����̂� �c�c�c �E �E
�����荠�ȃX�s�[�J�[���g�p���܂��B
�@���@100�ςōw�����܂������A�����Ɖ����o��̂����� (^^ ?
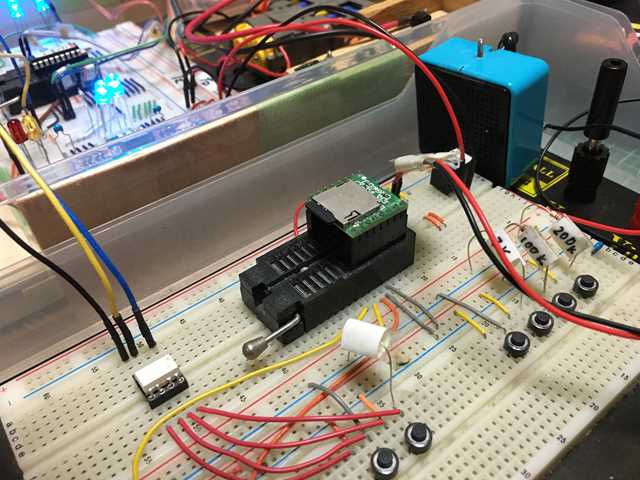
�����ڂ���MP3�v���C���[�̐ڑ��\���ł̊m�F�ł��B
�@���@�n�j�ł��B�����́A����Ȃ��̂����� (^^?
�E �E �E �E �E
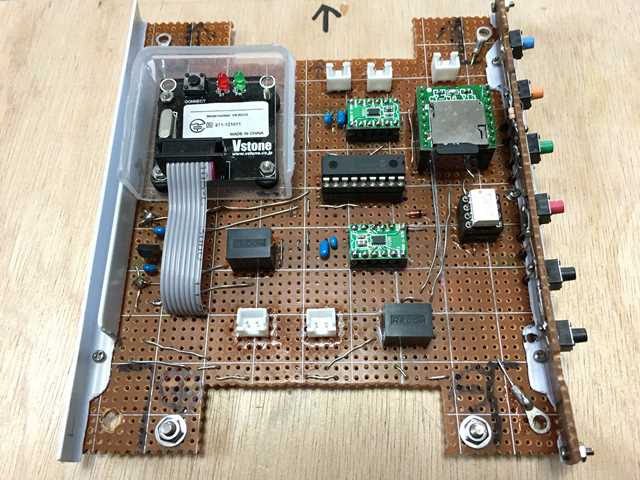
���e�X�g�{�[�h��ŁA�S�̐ڑ����Ă̓���m�F�ł��B
�E �E �E �E �E
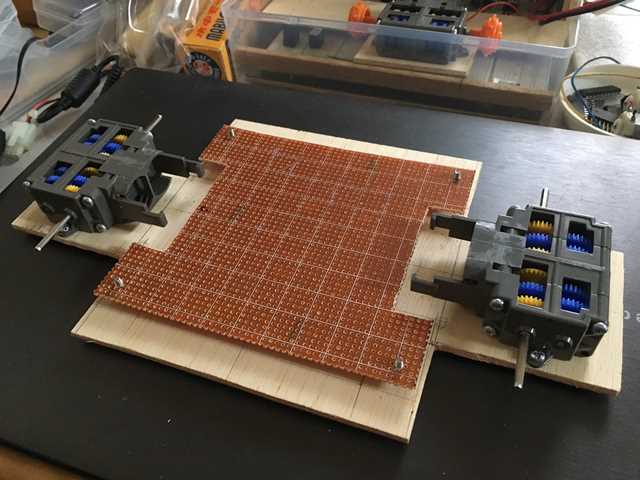
���ʼn��i�t���A �c�c�c ���J�i���z�C�[���ƃM���{�b�N�X���������ꂽ��Ԃł��B
�@���@���[�^�̐ڑ��R�l�N�^�[���������܂����B
�E �E �E�@����������쐬���܂����B �E �E
���l�ꔪ�ꂵ�Ȃ���A����������܂����B
�@���@�^�N�g�X�C�b�`�ނ̊���A���ʂ̗��Ă���Ԃŕt�������܂����B
�������ł��B �c�c�c ������ �h�����Ⴒ����h�ɂȂ�܂����ł��B(^^;
�@���@�ڐG�s�ljӏ��̓���ɋ�J�������ł��B(^^;
��( �ʼn��i ) �t���A�ɁA����Œ肵����Ԃł��B
�@���@�z�C�[���̉�]����LED�̐ݒu�X�y�[�X���Ȃ��̂ŁA�������Ă��܂���B (^^;
�E �E �E �E �E
��( �����i ) �t���A�ł��B �o�b�e���[�𒆉��̃X�y�[�X�g�ɌŒ肵�܂��B ���Ō㕔�ɃX�C�b�`��
�@���@�o�b�e���[�A�X�s�[�J�̐ڑ��R�l�N�^�[�����܂����B
�E �E �E �E �E
�����s➑̂̃~�b�L�[���O���X�ő��s���܂����B
�E �E �E �E �E
�����J�i���z�C�[�����g���Ă݂Ă̊��z�ł��B �����Ԃ́A�n���h���Ői�s�����ɁA�^�C���������Đi�s���܂��� �c�c�c �E���J�i���z�C�[���ł́A�t���[��ԂŒ�R�Ȃ���]����~����̃o����(�M�^���[��) �@�̑����ŁA45�x�̕����ɐi�s�ł��܂��B���̓��������p���āA�e���J�i���z�C�[���� �@��]�����̑g�����ɂ��A�S�����ɐi�s�ړ��̓��삪�ł��܂����B �E���J�i�����s�̐��x�́A�����Ȃ��ł����A�Ȃ�Ƃ������Ă���܂����B
�E �E �E �E �E