●オムニ走行機能の机上テスト
「 夢の国探検車 ミッキーモグラス 」で、ある程度のメカナム走行ができました。 ・今度は ……… ホイール構造は違いますが、類似している「 オムニホイール 」に 興味がありますので、机上で動作させて試行してみることにしました。
・ ・ ・ ・ ・
●オムニホイールは ……… ホイール自体の主動回転と装着ローラーの受動回転からの特性を活用して 各オムニホイールの回転方向の組合せにより、全方向への移動ができるようです。
・3輪で1組、または4輪で1組として使用できる。 ・使用するホイールは、すべて同じタイプ(1種類のみ)です。
・ ・ ・ ・ ・
●オムニホイールとメカナムホイールを比べてみたら ……… 立体的なホイール形状から、似ても似つかぬ別物ですが、動かす筐体に設置する各ホイー ルの設置要領は異なりますが、ホイール回転の方向制御が類似していることが感じられま したので、メカナムホイール装着の実装筐体「 夢の国探検車 ミッキー モグラス 」に、 組み込んだ駆動機構の考え方などを、そのまま転用しての試行を行うことにしました。
●プログラム : OMUNI4WDTES01 *MENUM4WD01を、そのまま転用しての作成です。
●配線図です。……… クリックすれば、拡大します。・制御プログラムや電子回路を構築する環境(テストボード)が ……… → ホイール回転が弱くなった感じですので、電源供給系を見直しました。
・ ・ ・ ・ ・
●自動( 平行 )走行機能を装備します。 既存機能のボタン操作で、前後進の自動走行アクションを指示していますが、 新たに、横方向( 平行移動 )の自動走行アクションの指示ボタン操作を追加します。
■自動( 平行 )走行 ……………【左側】ボタンを押下する。 ・左平行 【 自動 】( ON ) : ← ・右平行 【 自動 】( ON ) : → *自動走行(OFF)する時は ……… ( R1 OR R2 )ボタンを押下する。
・ ・ ・ 【 通常操作モード 】 ・ ・
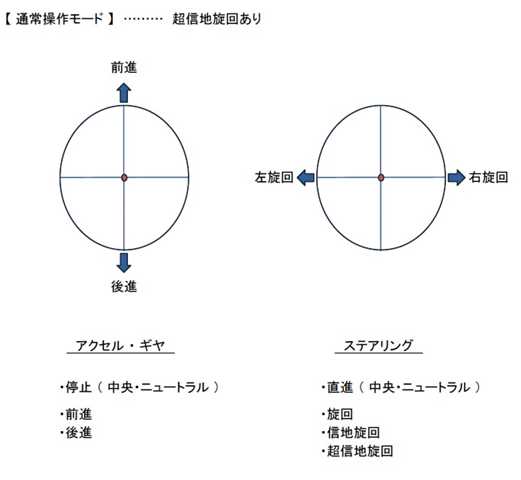
●通常走行イメージ ……… 前進・後進・旋回・信地旋回・超信地旋回
●通常走行のステイック操作イメージ
●操作指示エリア( スティツク情報 )仕切値設定です。 【 通常操作モード 】 ……… クリックすれば、拡大します。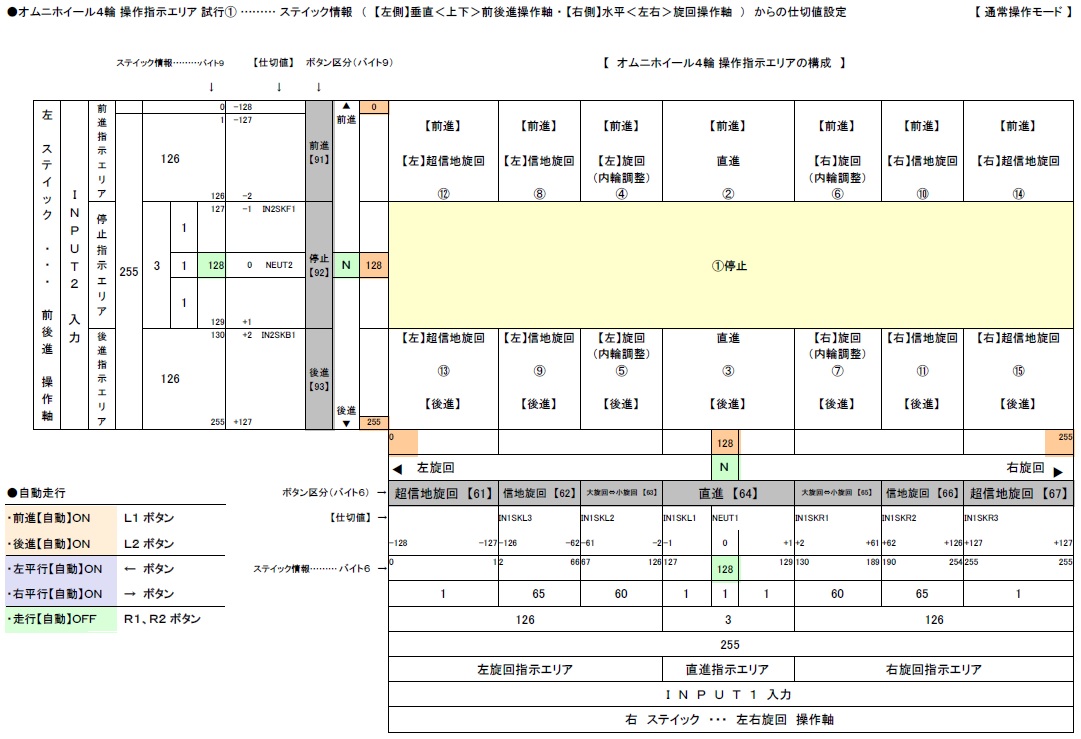
・ ・ ・ ・ ・
●通常走行のステイックとボタンの使い方です。 ------------------------------------------------------------------------------ ・アクセル・ギヤ ………………【左側】ステイック ・前 進 : 上方向 ・停 止 : 中央 【 ニュートラル 】 ・後 進 : 下方向 ------------------------------------------------------------------------------ ・ステアリング …………………【右側】ステイック ・(右)超信地旋回 : 右方向 (最右端) ・(右)信地旋回 : 右方向 ・(右)旋回 : 右方向 ・直 進 : 中央 【 ニュートラル 】 ・(左)旋回 : 左方向 ・(左)信地旋回 : 左方向 ・(左)超信地旋回 : 左方向 (最左端) ------------------------------------------------------------------------------ ・自動走行 ……………………………………【前側】(左)ボタン………… ・前 進【自動】(ON) : L1 ・後 進【自動】(ON) : L2 ……………………………………【左側】ボタン……………… ・左平行【自動】(ON) : ← ・右平行【自動】(ON) : → ……………………………………【前側】(右)ボタン………… ・走 行【自動】(OFF): R1、R2 ------------------------------------------------------------------------------ ・ギミック ・オムニ操作 (適用) ON :【左側】ボタン ………( ↓、↑ ) *連動して、オムニ起動【音】も(ON)になる。 ・オムニ操作 (解除) OFF :【右側】ボタン ………( □ 、X、○、△ ) *連動して、オムニ停止【音】も(ON)になる。 ------------------------------------------------------------------------------
・ ・ 【 オムニ操作モード 】 ・ ・ オムニ操作モードへの切替えは、コントローラのボタンで行います。 ・
●オムニ走行イメージ ……… ( 前後 ・ 左右 ・ 斜め ) 移動 ・ 旋回
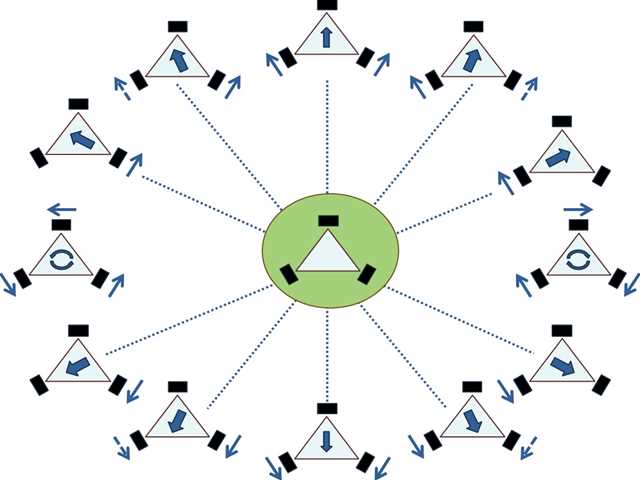
●オムニ走行のステイック操作イメージ
●操作指示エリア( スティツク情報 )仕切値設定です。 【 オムニ操作モード 】 ……… クリックすれば、拡大します。
・ ・ ・ ・ ・
●オムニ走行のステイック操作イメージ ------------------------------------------------------------------------------ ■オムニ操作モードの切替え方法 ・オムニ操作 (適用) ON する場合 ……【左側】 ボタン を 押下する。 ↓、↑ ・オムニ操作 (解除) ON する場合 ……【右側】 ボタン を 押下する。 □ 、X、○、△ ------------------------------------------------------------------------------ ■オムニ操作モード【適用】の場合、以下のアクション(ステアリング)をする。 ・ステアリング .............【右側】スティック ・(右)平行 : 右方向 (最右端) ・(右)斜め : 右方向 ・(右)旋回 : 右方向 ・直 進 : 中央 【 ニュートラル 】 ・(左)旋回 : 左方向 ・(左)斜め : 左方向 ・(左)平行 : 左方向 (最左端) ------------------------------------------------------------------------------
●プログラム : OMUNI4WDTES02 *OMUNI4WDTES01を、ベースにしての作成です。
●机上での動作確認OKです。 自動( 平行 )走行時のオムニホイール4輪(回転方向)動作を 机上で確認できました。
・ ・ ・ ●オムニ【3輪】 ……… ・ ・
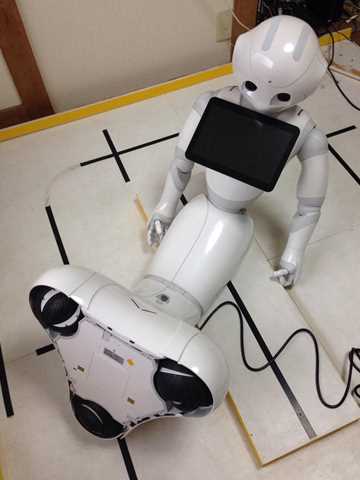
●オムニホイール3個で、1組の仕組みの場合は ……… ヒューマノイド系のロボットに、採用していますので、とても興味があります。 【 Pepper( ペッパー )】
→ ペッパー警部と、関係あるのかしら ?
●プログラム : OMUNI3WDTES01 *OMUNI4WDTES02を、ベースにしての作成です。 ■オムニ4WDを基本としての改良ポイント ・フロント右 (1輪 )とリヤ (2輪 )の【 3輪 】構成で、機能を流用する。 ・使用しないフロント左 (1輪 )の機能を閉塞する。 ・流用できない機能部分は、個別に機能設定する。
【3輪】 通常走行イメージ ……… 前進・後進・旋回・信地旋回・超信地旋回
●オムニ4WDを基本としての改良ポイント ■フロント 右 (1輪 )機能を流用する。 ・超信地旋回のみOK(現状のまま) ・以外は、強制的に停止(回転なし)設定する。 ■リヤ (2輪 )機能を流用する。 ・すべてOK(現状のまま) ■使用しない … フロント左 (1輪 )の機能は閉塞する。
【3輪】オムニ走行イメージ ……… ( 前後 ・ 左右 ・ 斜め ) 移動 ・ 旋回
●オムニ4WDを基本としての改良ポイント ■フロント 右 (1輪 )機能を流用する。 ・平行移動のみOK(現状のまま) ・斜め移動は【3輪】設定 ・エリアNO⑩(逆転)設定する。 ・エリアNO⑨(正転)設定する。 ・以外は、強制的に停止(回転なし)する。 ■リヤ (2輪 )機能を流用する。 ・すべてOK(現状のまま) ■使用しない … フロント左 (1輪 )の機能は閉塞する。
●机上での動作確認OKです。 オムニ【3輪】を想定しての動き ( 回転方向 )を、机上で確認ができました。
・ ・ ・ ・ ・
●感想 実際に走行させなければ、どの程度の精度で動くのか、わからないのですが …… ■オムニ4輪について ・正方形を意識して車体の中心から同じ距離で バランス良く、オムニホイールを均等に配置する必要性を感じました。 ・メカナム4輪と同様に、ある程度の精度で走行しくれる感じです。 ■オムニ3輪について ・正三角形を意識して車体の中心から同じ距離で バランス良く、オムニホイールを均等に配置する必要性を感じました。 ・それと、力の分解と合成を意識しての各ホイールの回転速度のバランスが 必要な感じがします。……… その際は、セッティングが難しそうです。
・ ・ ・ ・ ・