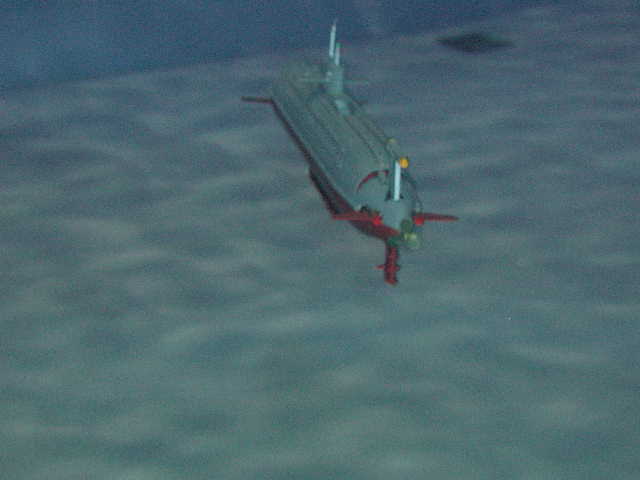
第2回「アクアモデファイター・ミーティング」で、『おやしお−F』改良後の走行・・・ ■ノーコン事象の確認 当日は、前回のノーコン事象の確認の為に、フル・オープン(1.5/3メートルエリア)状態で、行いました。 → 当日に走行(潜水艦/水上艇)したものは全体的にOKでしたので、やはり要因は、プール・シートと想定 されます。 因果関係は、不明ですが、今後は、常に、フル・オープンでの走行が、必須です。 浮上走行で、プールの端から端まで、一周しましたが、問題なく、コントロールできました。 1Fの’観察窓’からは、少しだけ、コントロールできましたが、やはりダメでした。 AMは、ダメなのかな〜 ■ダイナミカルダイブでの走行確認 今回は、バラストタンクへ注水せずに、スクリュウの推進力と潜舵の方向動作によるダイナミカルダイブでの走行 が、どのようなものか、試してみました。 特別な、セッテングはしていませんが、潜舵のニュートラル時に、少しだけですが、潜航方向にしました。 ■走行時の写真 当日は、他の潜水艦で沈没ケースがあり、乾さん と mistrelさん が、水底でのサルベージをしながら、写 真撮影していましたので、『おやしお−F』が写っていたら、 いいのにな と 思っていましたら、ラッキー な事に、水中からの撮影で、写っていたものを頂きました。 今までと違ったアングルでの写真で、とても綺麗で、気にいっています。 とても、感謝しています。 ありがとうございました。 それにしても、華麗なダイビング、綺麗な写真は、 ウ〜ン・・・ ナイスですね ●写真提供:mistrelさん
①浮上走行 スクリュウの推進力の強弱(モーター回転)を、加減しながら走行しました。 ●スロットル(弱)した場合 → やはり、舵の効き具合が悪く、曲がらないでした。 こんなものなんだろうな・・・ ●スロットル(多少強め)した場合 → 少しは、舵が効きだして、ある程度、曲がりました。 やはり、それなりの、推進力がいるのだな〜 ●フル・スロットル(全開)した場合 → 緩やかな傾斜軌道で、潜航しましました。 ウ〜ン・・・ いい感じでした ●スロットル(強弱)した場合 → スロットルの強弱に連動して、司令塔の水面上に出る変化が確認できました。 スピード・コントロールだけでも、潜航/浮上の面白い、走行ができるな〜 ●もちろん、潜舵のコントロールを加えると、よりダイナミックな走行ができました。 → もともとプラモデルの自動浮沈が好きなので、手動浮沈での、走行でも、とても面白い!
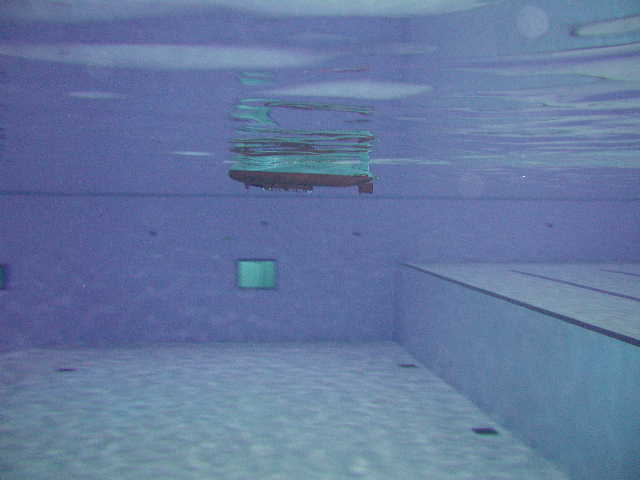
②潜望鏡深度走行 スクリュウの推進力の強弱(モーター回転)で、潜望鏡深度走行になったら、スロットルを固定すれば、ある程度 安定して走行が維持できました。 → 下の写真で、わかりましたが、ピッチコンの自動制御で、水平走行の軌道修正(潜舵が浮上方向)を、して いますね さすが、ピッチコンですね・・・ それにしても、船底部分が、なんか、変だな〜 特に、車輪(白いもの)が・・・ 潜水艦なんだがな〜

③水中走行 バラストタンクへ注水せずに、どこまで潜航できるのか、試してみました。 → ちゃんと、潜航できました。 ある程度、安定して水平走行が維持できました。 → 水底にも着きましたが、水底走行は、動くが、スピードがでない! もともとパワーがないからな〜 ダイナミカルダイブでの走行でも、十分、楽しめますね・・・