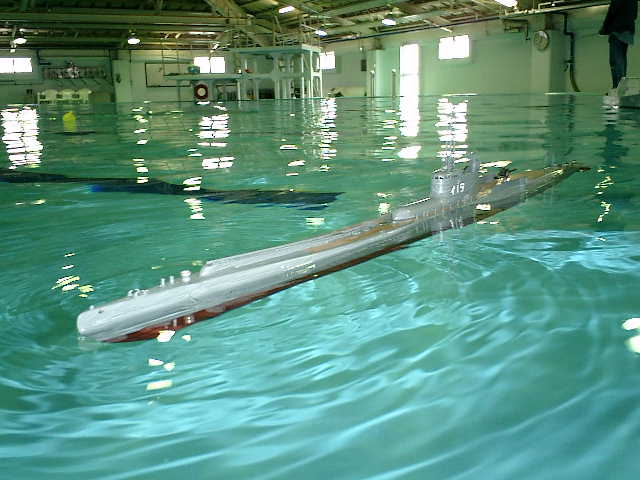
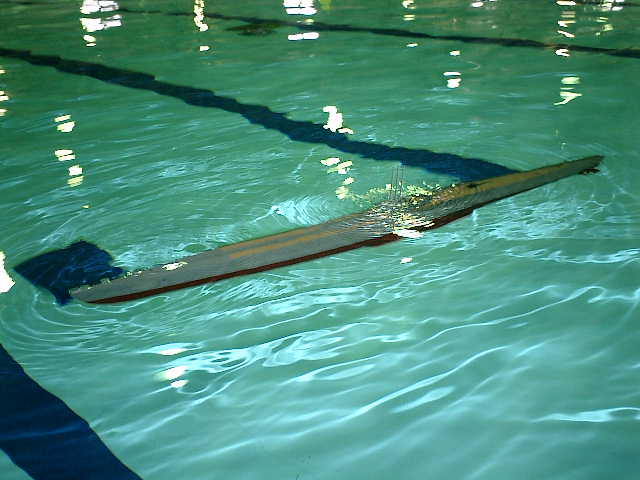
当日は、追浜デモ走行で、一般のギャラリーが多く、大盛況の中、無謀にも試運転走行を行ないました。 室内インテリアとして、家の部屋に飾って、鑑賞して楽しんでますが、とても安定して走行できましたので、 やはり高性能RC潜水艦でしたね 深度3メートルエリアでの走行及び数回の垂直潜航/浮上を、行なった後に、WTCのチエックを行ないましたが、 浸水は、まったく、ありませんでした。 この大きさのスケールモデルの性能を発揮するには、追浜の潜水訓練プールの環境が必要です。 → これまた、テストモードではなく、お遊びモードで楽しんじゃいました。 エヘヘ・・・ ■ダイナミカルダイブでの走行確認 このイ−19は、バラストシステムで、潜航/浮上するものですが、バラストタンクへ注水せずに、スクリュウ の推進力と潜舵の方向動作によるダイナミカルダイブでの走行が、どのようなものか、試してみました。 → 浮上走行状態では、まったく、潜航しませんでした。 これは、OKだろうな〜 ●浮力が、大きい または、バラスト(鉛板)が軽い。 ・船体の重心位置である司令塔甲板を、指で、上から押さえても、なかなか沈まない程、浮力があ り、バラストタンク(容量:1000cc)と、発砲スチロールの装着量からの浮力パワーは、 想定以上である。 ●潜舵が、最後部に着いている。 これは、関係があるのかな〜 バラストタンクへ注水して、潜航走行状態からの動作は、緩やかな潜航/浮上が行なえました。 ■垂直潜航/浮上の確認 家の自家製テスト用水槽では、それなりの姿勢(水平状態)が行なえましたが、ある程度の深度では、後部から 沈下して、傾斜角度が、だんだん大きくなりました。 → 現在のバランスでも、走行時は、まったく問題はないのだが・・・ バランス調整のやり直し! う〜ん、難しいそうだな〜 まっ、じっくり、取り込んでいきましょか ハル上部に空気が溜まって、空気(泡)が移動している感じがしたので、ある程度の空気穴を、開ける必要が、 ありそうだな・・・ → 綺麗な船体に、穴を開けるのは、いやだな〜 穴を開ける場合、空気(泡)を逃がすには、最低でも直径3ミリの穴が必要と思われるが、直径4ミリの 穴が、妥当だろうな〜 1ミリずつ・・・ また、深度3メートル環境では、通常の発砲スチロールでは、水圧により圧縮され浮力が弱まるみたいなので、 硬度のある素材を装備する必要性を感じました。