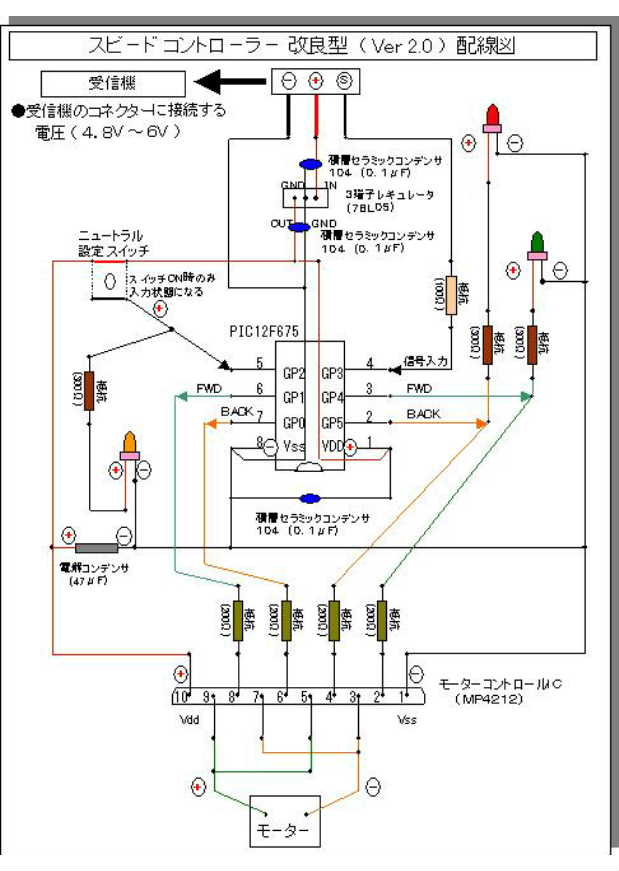
仠僗僺僐儞 夵椙宆 Ver 2.0 揹尮俆V埨掕嫙媼壔懳墳
巗斕偺儔僕僐儞梡僗僺亅僪僐儞僩儘亅儔亅偼丄彫宆壔乛惈擻揑偵傕桪傟偰偄偰椙偄偺偱偡偑 摦偔僾儔儌僨儖側偳偵搵嵹偟偰偄傞彫僷儚乕偺儌亅僞亅傪摦偐偡偵偼丄岦偄偰偄側偄姶偠偱 偡丅偦偙偱丄懴媣惈偼柍帇偟偰丄埨壙側儌亅僞亅梡偺僗僺亅僪僐儞僩儘亅儔亅傪丄帺暘側傝 偵岺晇偟側偑傜丄帋峴揑偵惢嶌偡傞帠偵偟傑偟偨丅
丂仺丂揹巕揑側暔偼丄偲偰傕嬯庤偱偡偑丒丒丒丂偑傫偽傝傑乣偡丅乮^^乯/
丒 丒 丒 丒 丒
仠攝慄恾偱偡丅乮 夵椙宆 Ver 2.0 乯 婎杮宆乮 Ver 1.0 乯偵懳偟偰丄儌乕僞乕僐儞僩儘乕儖俬俠偐傜丄弌椡偝傟傞僷儚乕傪梷 偊偨偄偺偱丄堦斒揑側儗僊儏儗乕僞俬俠乮俈俉俴侽俆丗俆倁 嵟戝侾侽侽倣俙乯傪梡偄偰 僗僺亅僪僐儞僩儘亅儔亅傊偺嵟戝擖椡揹埑傪壓偘偰丄帋峴偡傞帠偵偟傑偟偨丅
仭巊梡偡傞揹巕僷乕僣側偳乮 夵椙宆 Ver 2.0 梡 乯 丒俹俬俠侾俀俥俇俈俆亅俬乛俹丂丂丂丂丂丂丂丂丂丂丂丂 丂丗侾屄 丒斈梡俬俠僜働僢僩乮俉俹乯丂丂丂丂丂丂丂丂丂丂丂丂丂丂 丗侾屄 丒娵僺儞俬俠僜働僢僩乮俉俹乯丂丂丂丂丂丂丂丂丂丂丂丂丂 丗侾屄 丒儌乕僞乕僐儞僩儘乕儖俬俠乮搶幣惢 俵俹係俀侾俀乯丂丂 丗侾屄 丒俁抂巕儗僊儏儗乕僞乮俈俉俴侽俆乯 俆倁丂侾侽侽倣俙丂丂丗侾屄 丒僙儔儈僢僋僐儞僨儞僒乕乮侽丏侾兪俥乯侾侽係丂懴埑俆侽倁丗俁屄 丒揹夝僐儞僨儞僒乕乮係俈兪俥乯懴埑侾俇倁丂丂丂丂丂丂丂丂丗侾屄 丒彫宆僗僀僢僠乮僞僋僩俽倂丂俢俠侾俀倁 俆侽倣俙乯丂丂丂丗侾屄 丒彫怣崋梡僐僱僋僞乕丂丂丂丂丂丂丂丂丂丂丂丂丂丂丂丂丂 丗侾屄 丒怣崋揱払僐僱僋僞梡僺儞丂丂丂丂丂丂丂丂丂丂丂丂丂丂丂 丗俁屄 丒掞峈乮侾乛係倂丂侾侽侽兌)丂丂丂丂丂丂丂丂丂丂丂丂丂丂 丗侾屄 丒掞峈乮侾乛係倂丂俀侽侽兌)丂丂丂丂丂丂丂丂丂丂丂丂丂丂 丗係屄 丒掞峈乮侾乛係倂丂俁侽侽兌)丂丂丂丂丂丂丂丂丂丂丂丂丂丂 丗俁屄 丒俁冇俴俤俢乮愒怓乯俀丏侾倁丂侾侽倣俙丂丂丂丂丂丂丂丂丂丗侾屄 丒俁冇俴俤俢乮椢怓乯俀丏侾倁丂侾侽倣俙丂丂丂丂丂丂丂丂丂丗侾屄 丒俁冇俴俤俢乮墿怓乯俀丏侾倁丂侾侽倣俙丂丂丂丂丂丂丂丂丂丗侾屄
丒 丒 丒 丒 丒
仠僥僗僩偱巊梡偡傞僾儘億乮憲怣婡乯偱偡丅 儔僕僐儞僇乕側偳偱巊梡偟偰偄偨丄斈梡揑側俀僠儍儞僱儖梡偺僾儘億乮Futaba惢乯偱偡丅
仠僥僗僩偱巊梡偡傞庴怣婡偱偡丅 忋婰偺僾儘億偱巊梡偟偰偄偨暔偱丄斈梡揑側俀僠儍儞僱儖梡偺庴怣婡乮Futaba惢乯偱偡丅
仭奺僐僱僋僞乕偺愙懕愭偱偡丅 丂丒俠俫.俀丂丗丂僗僺亅僪 僐儞僩儘亅儔亅梡 丂丒俠俫.侾丂丗丂僗僥傾儕儞僌 僒乕儃梡 丂丒俛俙俿丂 丗丂僶僢僥儕乕梡
丒 丒 丒 丒 丒
仠僥僗僩儃乕僪忋偵丄巊梡偡傞揹巕僷乕僣偺幚憰偱偡丅 彫宆俹俬俠乮PIC12F675乯偵丄僾儘僌儔儉傪慻傒崬傫偱壱摦偝偣傞僥僗僩儃乕僪偱偡丅 儌乕僞乕僐儞僩儘乕儖俬俠偼丄係倁嬱摦懳墳偺僷儚乕俵俷俽 俥俤俿儌僕儏乕儖偱丄戝揹椡 崅懍僗僀僢僠儞僌梡俫亅僗僀僢僠宍僪儔僀僶偺俵俹係俀侾俀乮搶幣惢乯傪巊梡偟傑偡丅
憲怣婡偐傜偺僯儏乕僩儔儖乮掆巭忬懺乯偐傜丄慜屻恑偺僼儖僗儘僢僩儖乮慡奐乯帪偵敽偆 奺売強傪僥僗僞乕偱寁應偟傑偟偨傜丄壓婰偺傛偆偵揹埑曄壔偟傑偟偨丅 仭儌乕僞乕僐儞僩儘乕儖俬俠乮俵俹係俀侾俀乯 丂丒擖椡僎乕僩乮俀丄係丄俇丄俉乯僺儞偺揹埑曄壔 丂丂俀僺儞丗 丒掆巭忬懺(0.0V)仺慜恑慡奐(2.9V) 丒掆巭忬懺(0.0V)仺屻恑慡奐(0.0V) 丂丂係僺儞丗 丒掆巭忬懺(0.0V)仺慜恑慡奐(0.0V) 丒掆巭忬懺(0.0V)仺屻恑慡奐(2.2V) 丂丂俇僺儞丗 丒掆巭忬懺(4.8V)仺慜恑慡奐(3.3V) 丒掆巭忬懺(4.8V)仺屻恑慡奐(1.0V) 丂丂俉僺儞丗 丒掆巭忬懺(4.8V)仺慜恑慡奐(0.1V) 丒掆巭忬懺(4.8V)仺屻恑慡奐(3.4V) 丂丒弌椡僪儗僀儞乮俁丄俆丄俈丄俋乯僺儞偺揹埑曄壔 丂丂俁僺儞丗 丒掆巭忬懺(0.7V)仺慜恑慡奐(0.1V) 丒掆巭忬懺(0.7V)仺屻恑慡奐(2.9V) 丂丂俆僺儞丗 丒掆巭忬懺(0.7V)仺慜恑慡奐(3.2V) 丒掆巭忬懺(0.7V)仺屻恑慡奐(0.2V) 丂丂俈僺儞丗 丒掆巭忬懺(0.7V)仺慜恑慡奐(0.1V) 丒掆巭忬懺(0.7V)仺屻恑慡奐(2.9V) 丂丂俋僺儞丗 丒掆巭忬懺(0.7V)仺慜恑慡奐(3.2V) 丒掆巭忬懺(0.7V)仺屻恑慡奐(0.2V) 仭俁抂巕儗僊儏儗乕僞偺俷倀俿売強丗丂掆巭忬懺(4.8V)仺慜恑慡奐(3.2V) 仭俹俬俠乮亄亅乯抂巕売強丂丂丂丂丗丂掆巭忬懺(4.8V)仺慜恑慡奐(3.3V) 仭揹夝僐儞僨儞僒抂巕乮亄亅乯売強丗丂掆巭忬懺(4.8V)仺慜恑慡奐(3.2V)
丒 丒 丒 丒 丒
仠偦傟偱偼丄僥僗僩奐巒偱偡丅 巊梡僾儘億乮憲怣婡乯偺僯儏乕僩儔儖埵抲偱丄僯儏乕僩儔儖愝掕僗僀僢僠傪墴偟傑偟偨丅
丂仺丂墿怓俴俤俢揰摂両丂僯儏乕僩儔儖埵抲偺婰壇姰椆偱偡両丂傛乕偟両
仠慜恑夞揮偣傛両
丂仺丂椢怓俴俤俢揰摂両丂儌乕僞乕慜恑夞揮偟傑偟偨両丂傛乕偟両
仠屻恑夞揮偣傛両
丂仺丂愒怓俴俤俢揰摂両丂儌乕僞乕屻恑夞揮偟傑偟偨両丂傛乕偟両
丒 丒 丒 丒 丒
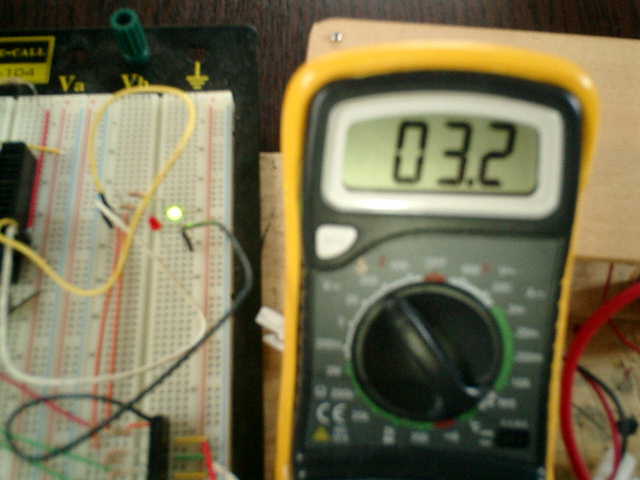
仠儌乕僞乕乮慜恑乯慡奐夞揮偱丄揹埑忬嫷傪妋擣偣傛両
丂仺丂俁丏俀倁偱偡両丂偪傚偭偲丄僆乕僶乕偟偰偄傞側乣丂傑偭丄偄偄偐両丂(^^丟
仠儌乕僞乕乮屻恑乯慡奐夞揮偱丄揹埑忬嫷傪妋擣偣傛両
丂仺丂俀丏俉倁偱偡両丂偪傚偭偲丄掅偄偗偳丄偙傟偱俷俲偐側丂(^^丠
丒 丒 丒 丒 丒
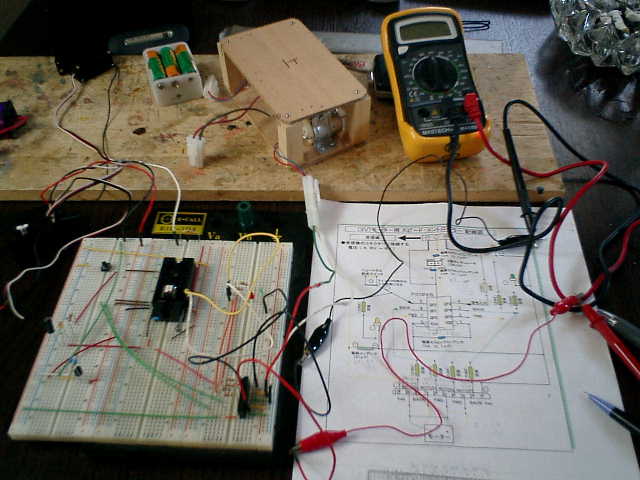
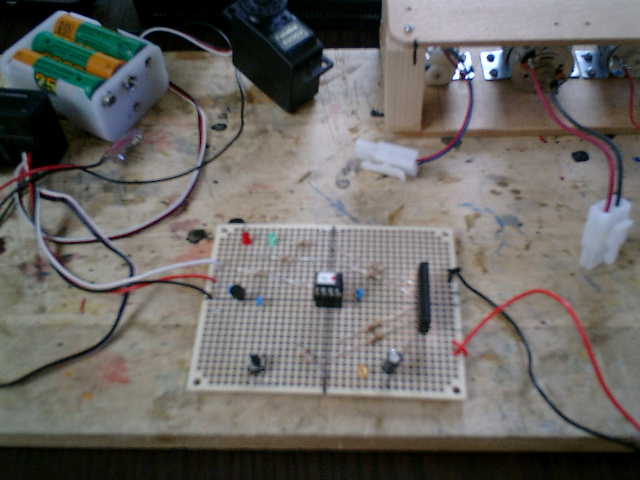
仠帋偟偵丄婎斦忋偱杮奿攝慄偟傑偟偨丅 偐側傝戝宆僒僀僘偺僗僺亅僪僐儞僩儘亅儔亅偵側傝傑偟偨偑丄偁傞掱搙偺彫宆壔偼壜擻偲巚 傢傟傑偡偺偱丄昁梫偵側傟偽梡搑偵墳偠偰丄彫宆僒僀僘偺惢嶌傪偟偰傒偨偄偱偡丅
丂仺丂偟偐偟側偑傜丄愙怗晄椙偺楢敪偱丒丒丒丂僴儞僟晅偗偼嬯庤偩側乣丂(^^丟
丒 丒 丒 丒 丒
幚嵺偵摦偐偡暔偵搵嵹偟丄偁傞掱搙偺帪娫悢傪妡偗偰儔僕僐儞憖嶌偟側偗傟偽丄壜摦忬嫷偑 暘偐傝傑偣傫偑丄側傫偲偐惢嶌偱偒傑偟偨丅丒丒丒丂偪傖傫偲丄摦偔偺偐偟傜丂(^^丠