乮丂 嘆偼偠傔偵 丂 嘇婎杮巇條丂 嘊幚憰帋峴 丂乯
仠僗僺僐儞乮俀僠儍儞僱儖庴怣婡梡乯俿俛倁幃俤侾宆 幚憰斉偺帋峴
嘇婎杮巇條
俼俠婡婍椶偺廂擺応強(宍忬)偵敽偆丄僗儁乕僗揑側惂栺偑偁傝傑偡偺偱丒丒丒 彮偟偱傕僗儕儉壔傪恾偭偰丄彫宆僒僀僘偺婎斅偵偟偨偄偺偱丄僯儏乕僩儔儖愝掕偺僗僀僢僠 傗俴俤俢乮掞峈娷傓乯側偳傪庢傝彍偄偰丄昁梫嵟彫尷偺揹巕僷乕僣椶偱攝抲峔惉偟傑偡丅
丒 丒 丒 丒 丒
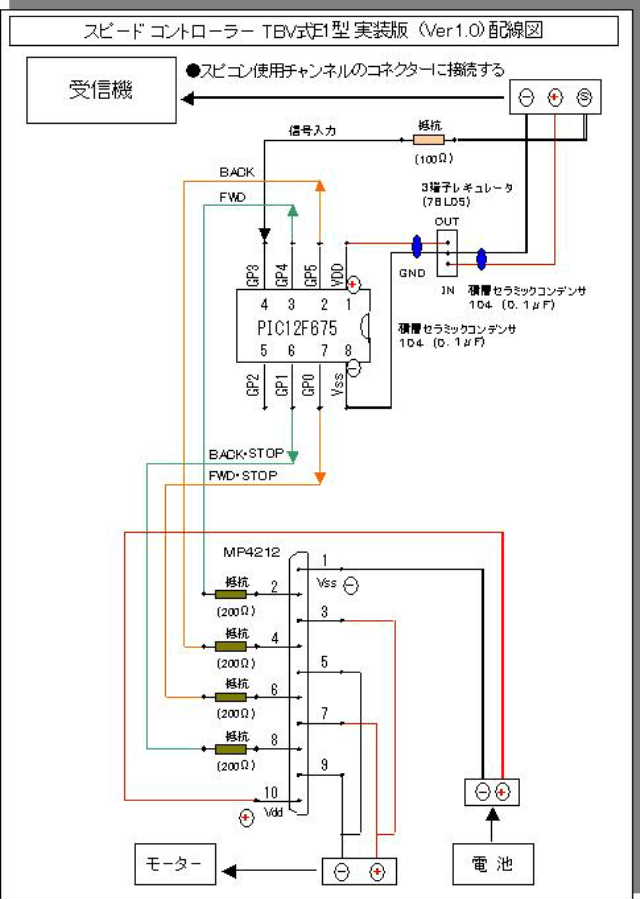
仠攝慄恾偱偡丅 僗僺僐儞婎斅偵偼丄僯儏乕僩儔儖愝掕偺僗僀僢僠偼憰旛偟傑偣傫偺偱丄僯儏乕僩儔儖抣偼僾 儘僌儔儉撪偺徣棯抣傪帺摦揑偵揔梡偝偣傑偡偑丄擟堄偵愝掕偑昁梫側帪偼丄僥僗僩儃乕僪忋 偱擟堄愝掕傪峴側偄丄偙偺擟堄愝掕抣傪僗僺僐儞婲摦帪偵帺摦揑偵揔梡偝偣傑偡丅
仠僾儘僌儔儉偼俿俛倁幃俤侾宆幚憰斉偱偡丅 亂俤宆亃帋峴僾儘僌儔儉傪棳梡偟丄揹椡屄暿巊梡懳墳偺俿俛倁幃俤侾宆幚憰斉偲偟偰 揹抮俁杮(3.6V)擖椡仺嵟戝弌椡(3V)巇條偺婎杮斉僾儘僌儔儉傪嶌傝傑偟偨丅 仭僯儏乕僩儔儖埵抲丒丒丒亂 僗僥僀僢僋丗嵟壓晹 亃亂 僩儕儉丗嵟忋晹 亃 丂丂------------------------------------------------------------------------------ 丂丂丒俽俿俛倁俤侾侽侽乮 倁俤俼 俤侾.侽侽 乯丂俿俛倁幃俤侾宆 幚憰斉 丂丂丂丂乮丂揹椡屄暿巊梡懳墳丂揹抮俁杮(3.6V)擖椡仺嵟戝弌椡(3V)巇條丂婎杮斉丂乯 丂丂------------------------------------------------------------------------------ 仭儌乕僞乕僐儞僩儘乕儖俬俠傊偺揹椡壜曄嫙媼偺戝偒偝偵弨偠偰丄壓婰偺弌椡偵側傝傑偡丅 丂丂揹椡壜曄嫙媼乮揹抮杮悢乯丂丂儌乕僞乕傊嫙媼弌椡乮嵟戝揹埑乯 _______________________ _____________________________ 丂丒揹抮侾杮乮栺侾丏俀倁乯丂仺丂栺侾丏侽倁 丂丒揹抮俀杮乮栺俀丏係倁乯丂仺丂栺俀丏侽倁 丂丒揹抮俁杮乮栺俁丏俇倁乯丂仺丂栺俁丏侽倁 丂丒揹抮係杮乮栺係丏俉倁乯丂仺丂栺係丏侽倁 丂丒揹抮俆杮乮栺俇丏侽倁乯丂仺丂栺係丏俇倁 丂丒揹抮俇杮乮栺俈丏俀倁乯丂仺丂栺俆丏俇倁 僾儘僌儔儉偺愝掕挷惍偼丄揹抮俁杮嫙媼(3.6V)偱仺嵟戝揹埑俁倁弌椡傪婎弨偵偟傑偟偨丅
丒 丒 丒 丒 丒
仠僗僺僐儞婎斅偱偡丅
丂仺丂婎斅傪曐岇偟偨偄偺偱丄働乕僗偵廂擺偡傞帠偵偟傑偟偨丅
丒 丒 丒 丒 丒