●ESP32 オムニ4輪・2系統( スマホ・パッド )併用で構想
・ ・ ・ ・ ・
2系統(スマホ・パッド)入力の併用操作から オムニ(4輪)駆動の試行ができましたので 筐体に実装して、動かしてみることにしました。
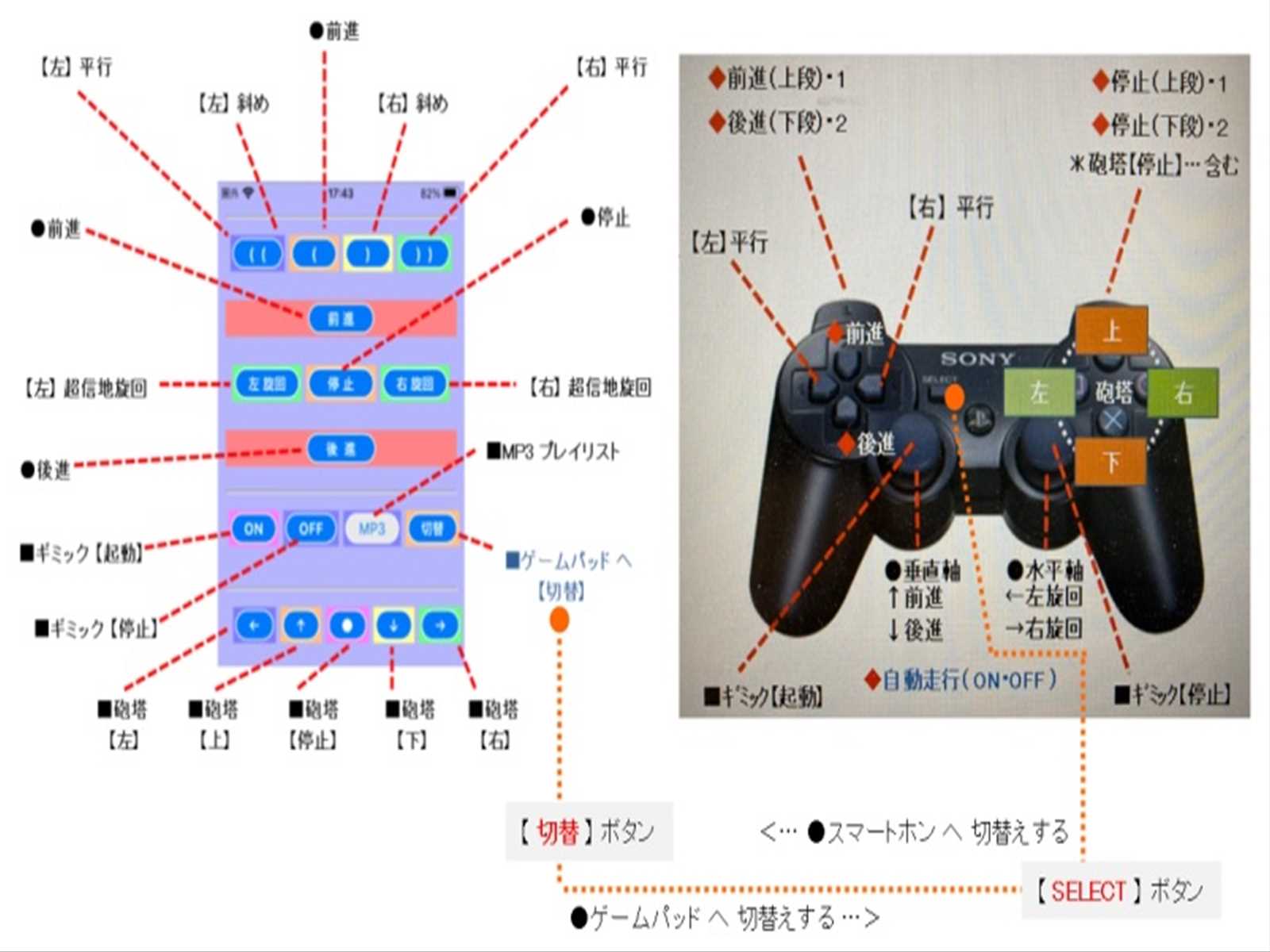
・ ・ ・ ●2系統(スマホ・パッド)操作のイメージです。 ・ ・
【 Taka袋式・コントローラ 】の主な操作ボタンです。
●下部へ ……… MP3系が続きます。*操作ボタンとプレイリスト …… クリックすれば、拡大します。
・ ・ ●( スマホ ⇔ PS2 )操作機器を ……… ・ ・ ボタン操作で「 切替え 」できます。 ・
●2系統・併用操作イメージです。……… クリックすれば、拡大します。
・ ・ ●操作画面パネルを ……… ・ ・ 「 DIPスイッチ 」で指定できます。 ・
●4種類の操作画面パネルです。……… クリックすれば、拡大します。
・ ・ ・ ●IOT接続での … 操作画面パネルです。 ・ ・
●画面(幅)の異なる … 2種類から選びます。*クリックすれば、拡大します。 【左側】の大きめな 画面は … パソコンで使用します。 【右側】の小さめな 画面は … スマホで使用します。・パソコンのモニターでは、両画面が使用できます。
・ ・ ・ ・ ・
●【 ESP-WROOM-32 開発ボード 】GPIOピンの用途です。 … クリックすれば、拡大します。
・ ・ ●スマホ ( iphoon ) から ・ ・ アクセスポイント【 TAKABUKURO 】に接続します。 ・
●【 TAKABUKURO 】 SSIDを選択です。
・ ・ ●アクセスポイント【 TAKABUKURO 】に接続できれば … ・ ・ Taka袋Webサーバーを呼び出します。 ・
●スマホ ( iphoon ) のブラウザから ……… http://takabukuro.local/
( Taka袋・webサーバ )に アクセスです。
・ ・ ・ ・ ・
●走行イメージ ……… ( 前後 ・ 左右 ・ 斜め ) 移動 ・ 超信地旋回
・ ・ ・ ・ ・
クリックすれば、拡大します。
●動作アクションを駆動制御する ……… GPIOピンの出力パターンです。クリックすれば、拡大します。
・ ・ ・ ・ ・
●砲塔駆動の動作アクション ……… GPIOピンの出力パターンです。
●机上テスト版のプログラム(TES-ESP32-OMNI4-HEIYOU-13)を ベースにして、実装プログラムの作成です。
//******************************************************** //●3系統・併用操作 オムニ4輪 実装① プログラム // ESPマイコン(ESP32): ESP32-OMNI4-3HEIYOU-01 //******************************************************** //●コントローラ(3系統)接続の方法 … 3 systems //------------------------------------------------------- //①スマホ(iphoon)………通信接続 // ・(WEBブラウザ・HTML)ボタン操作で入力する。 *1 //②ゲームパッド(VS-C3)… <SPI>通信接続 *2 // ・(ボタン・ステイック)操作で入力する。 //③【IOM】………………… <インターネット>接続 // ・(WEBブラウザ・HTML)ボタン操作で入力する。 *1 //------------------------------------------------------- // *1 WEBブラウザ使用では … // ・スマホ ・タブレット ・パソコンなどで使用可 // *2 ゲームパッド使用しない場合は … // ・ゲームパッド(VS-C3)の電源OFFでもOKです。 //------------------------------------------------------- //・DMD駆動 ( DRV8835 )機器制御 //・MP3プレーヤー ( DFPlayer mini )機器制御 //・ゲームパッド類 ( VS-C3・VS-RCV3 )機器制御 //******************************************************** //■アナログ入力①:(ANA_IN1・GPIO34<A6>):0~4095 //-------------------------------------------------------- // DIP 選択…画面パネルNO(GPANE_NO) //-----<スマホ:コントローラ切替SW(0)>----------------------- // 0 ①【フルオペ】……… フルオペレーション // 1 ②【砲塔なし】……… 砲塔操作(なし)パネル // 2 ③【オムニ走行】…… オムニ走行操作パネル // 3 ④【基本走行】……… 基本走行操作パネル //-----<PAD:コントローラ切替SW(1)>----------------------- // 4 ⑤【PS2】………… (PS2)コントローラ //-----<IOM:コントローラ切替SW(2)>----------------------- // - - 【モニタ】………… オムニ走行操作パネル //******************************************************** //■アナログ入力②:(ANA_IN2・GPIO35<A7>):0~4095 //-------------------------------------------------------- // DIP 選択…接続形態NO(SETZK_NO) // 0 ① 自プログラム(AP)に接続 // 1 ② 家ルータ(AP)に接続 // 2 ③ 他プログラム(AP①)に接続 // 3 ④ 他プログラム(AP②)に接続 // 4 ⑤ 【IOM】経由接続 //******************************************************** //■コントローラ切替SW (CONTR_SW) // ・0 - スマホ … 画面パネルNO【5:PS2】以外 // ・1 - PS2 … 画面パネルNO【5:PS2】のみ // ・2 - IOM … モニター //******************************************************** //●スマホの送信ボタンとアクション項目 // REQ ボタン アクション処理 //------------------------------------------------------- //【基本】機能項目 //------------------------------------------------------- // 1 【F】 → /F_ACT <01>●【前進】 // 2 【S】 → /S_ACT <02>●【停止】 // 3 【B】 → /B_ACT <03>●【後進】 // 4 【L】 → /L_ACT <04>【左】超信地旋回 // 5 【R】 → /R_ACT <05>【右】超信地旋回 //------------------------------------------------------- // 6 【ON】 → /ON_ACT <06>■ギミック【起動】 // 7 【OFF】→ /OFF_ACT <07>■ギミック【停止】 //------------------------------------------------------- // 8 【((】 → /((_ACT <08>【左】平行 // 9 【(】 → /(_ACT <09>【左】斜め // 10 【)】 → /)_ACT <10>【右】斜め // 11 【))】 → /))_ACT <11>【右】平行 //------------------------------------------------------- // 12 【切替】→ /PS2_ACT <12>ゲームパッド【切替】 //------------------------------------------------------- //【砲塔】機能項目 //------------------------------------------------------- // 20 【←】 → /HL_ACT <20>■砲塔【左】 // 21 【↑】 → /HU_ACT <21>■砲塔【上】 // 22 【●】 → /HS_ACT <22>■砲塔【停止】 // 23 【↓】 → /HD_ACT <23>■砲塔【下】 // 24 【→】 → /HR_ACT <24>■砲塔【右】 //------------------------------------------------------- // - 【■】 → /play stop ●停止 // - 【>】 → /play play ●再生 // - 【繰返し】 → /play looptrack ●ループ //------------------------------------------------------- // - 【音量】 → /volume ●ボリューム //******************************************************** //●自プログラム(AP)接続の場合 //■当該機器(ESP-WROOM-32)を … アクセスポイントサーバ にする。 //・アクセスポイント( SSID ): TAKABUKURO //・Taka袋Webサーバー ( http://takabukuro.local/ ) // ドメイン「 .local 」 ホスト名「 takabukuro 」 // IPアドレス ( http://192.168.4.1/ ) //******************************************************** //●【IOM】接続機能 //-------------------------------------------------------- //■インタネット接続のWEBサーバ(CGI)処理をキックする。 // ・WEBサーバ内の<PHP>処理プログラムを実行させる。 //■インタフェース処理 // ・(WEBサーバ → ESP32)間で、ボタン情報を取得する。 //■アナログ入力② … DIP(4)・ ⑤【IOM】経由接続 //-------------------------------------------------------- //********************************************************
・ ・ ・ ・ ・
●配線図です。……… クリックすれば、拡大します。
・ ・ ・ ・ ・
●実装する基板の配線図です。 ……… クリックすれば、拡大します。→ 【ブレッドボード BB-801】を連結して拡張しました。
・ ・ ・ ・ ・
●配線図を見ながら … 基板を作ります。
・ ・ ・ ・ ・
●感想 オムニ(4輪)駆動の動きで走行できました。
・ ・ ・ ・ ・














