オートピッチコントロール(Auto Pitch Control)を略して、’ピッチコン’とも言われている。 ●簡単に言えば・・・水平走行維持装置である。 艦首の上下縦方向に振る動きである’ピッチング(縦ゆれ)’を、水平走行軌道に維持できるように、 潜舵を自動的に、制御してくれるユニットである。 ●そのユニットは・・・故障もなく、安定している 【HLC-04型】です。 光センサーを使用しており、船体の(潜航/浮上の傾き度)を検知して、水平走行維持できるように潜舵を 自動的に制御してくれる。これに伴い、走行が滑らかになりプロポからのコントロールもしやすくなる。 この【HLC-04型】は、±15度のサーボストロークになるよう調整されており両側制御である。 開発背景として、水深50cmのコンクリートの底に、RC潜水艦の最下部(腹)がこする為、 なんとかRC潜水艦のピッチング幅を、少しでも小さくしようと考え、実際のフィールドから生まれたもの であるので、私をはじめ、搭載している皆さんの評判も良く、高性能RC潜水艦の多くが搭載しています。 ●問い合わせ先 ・HONN MODEL CRAFT (ホーンモデルクラフト) ・E-mail : yusio573@feel.ocn.ne.jp ●サーボに接続された状態です。 『おやしお-F』に、初めて搭載しました。コンパクトサイズですね ↓


■船体を水平にした状態である(下の写真) 潜舵が、船体と同様に、水平に維持されている。 ・船体が、水平に保たれていれば、潜舵は、’ピタッ’と停止状態である。 ・船体の水平状態から、船体の先を微小に、上下傾くと、連動して、潜舵が、水平に維持しようと微小角度の 範囲で、激しく上下動作を自動制御する。 → う~ん、すごい・・・ 潜舵のニユートラルは、HLCが非常に感度が高いのがわかる。

■船体を潜航姿勢にした状態である(下の写真) 潜舵が、船体を浮上方向の軌道に乗せようと、 自動制御されている。 ・潜航姿勢の傾き度に合わせて、潜舵が、その傾き度分だけ浮上方向に向く動作をする。 → 潜舵の最大角度は、ニユートラル(水平状態)から15度に設定されている。 ・プロポ(送信機)からのコントロールが優先されており、この時は、潜舵の最大角度は、 15度以上のサーボ・フル・ストロークである。(使用サーボのノーマル仕様通り) → う~ん、すごい・・・ まさしく、水平維持装置である。

■船体を浮上姿勢にした状態である(下の写真) 潜舵が、船体を潜航方向の軌道に乗せようと、 自動制御されている。 ・浮上姿勢の傾き度に合わせて、潜舵が、その傾き度分だけ潜航方向に向く動作をする。 → 潜舵の最大角度は、ニユートラル(水平状態)から15度に設定されている。 ・プロポ(送信機)からのコントロールが優先されており、この時は、潜舵の最大角度は、 15度以上のサーボ・フル・ストロークである。(使用サーボのノーマル仕様通り)

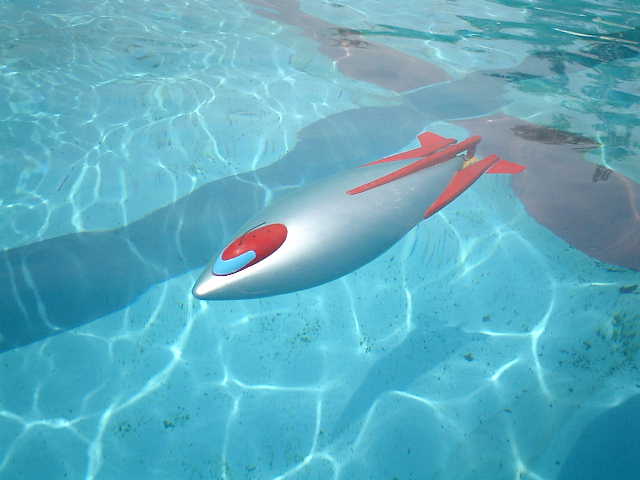
■『おやしお-F』の初めての走行で、いきなりOKです! テストらしいものは、家のお風呂での着底テストのみでしたので、不安だらけの状況の中・・・ → 初めての走行で、いきなりOKでした。 あらっ ビックリ! 滑らかな走行で、プロポからのコントロールもしやすく、感動ものでした。 (良く考えてみましたら・・・) → これは、水平走行維持装置である ’オートピッチコントロール(Auto Pitch Control)’を搭載 しているおかげと思われます。 船体のバランス調整は、あまりやっていませんので、走行時のアンバランスなところを、水平走行で きるように、自動的に、軌道修正してくれてるからです。 机上での稼働確認による、高性能は、ある程度想定していましたが、実際の試運転によるフィールド テスト結果が、想定以上でした。 ■評価として・・・ RC潜水艦には、オートピッチコントロール 【HLC-04型】 は、必須のユニットです。 製作済み及びこれから製作する 私のRC潜水艦には、すべて搭載予定です。 ■オートピッチコントロール【HLC-04型】を搭載している 私の所有RC潜水艦です。




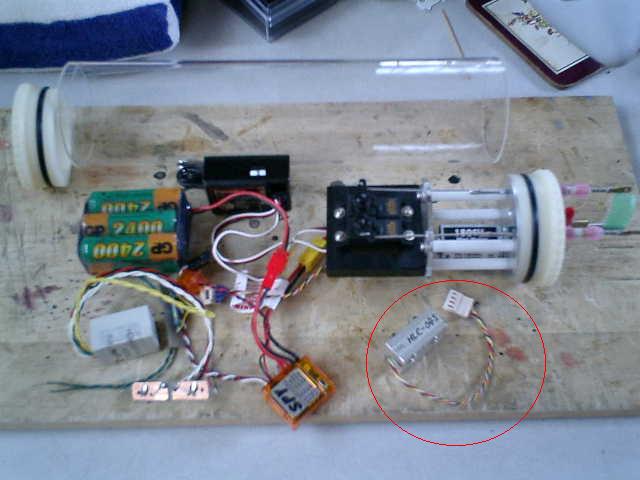
●右下の円内(赤色枠)が、【HLC-04S型】のオートピッチコントロールです。 ↓
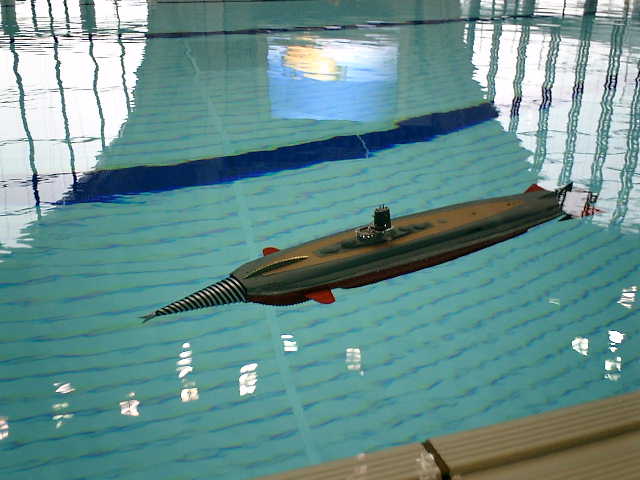
●超小型の【HLC-04S型】を搭載した汎用WTCを、艦内に組み込んでいる私の所有RC潜水艦です。 ↓

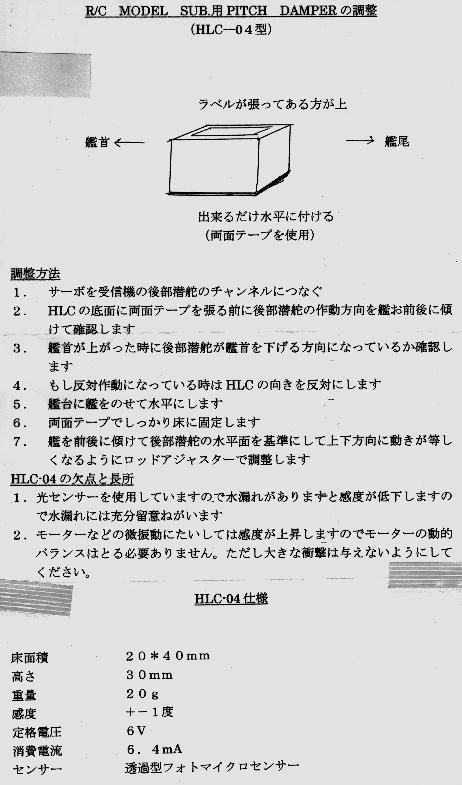
●ご参考 最初のピッチコンを組み込む際に、面白い動作事象を、やっちゃいましたので、ご参考にして下さい。(^^; ◆動作事象は・・・ ●艦首が上がった時には・・・ → 前部潜舵の変化が、無い状態である。 あれ! なんだろうな~ (^^? ●艦首が下がった時には・・・ → 前部潜舵は、艦首を上げる方向になっている。 これは、OK! です。 ◆上記の動作事象からの解決方法 ①ピッチコンの設置方向と動作は問題ないようである。 ②潜舵のニユートラルは、HLCが非常に感度が高いので無視する。 ③まずは、艦をピッチング(潜航/浮上の傾き)させる。 ・この時、サーボホーンが左右に動作すれば、HLCは正常である。 → 確認OK! ④サーボホーンは、左右ほとんど同じ角度で止まる。 → 確認OK! ⑤艦をピッチング(潜航/浮上の傾き)させた時に、潜舵が潜航/浮上の傾き度が、均等の角度になるよう なところで、サーボホーンに付けているロッドアジヤスタねじを、セットして固定する。 → セット完了! -------あら、ちゃんと動作する。(^^)------- 私が、勝手にサーボホーンの位置を変えてしまったのが原因であった。 これがダメでしたね・・