( ①S-1仕様走行 ②本体の解体 ③RC機器 ④改造・テスト ⑤RC仕様走行 )
【 4/5 ページ 】 ラジコン(水上走行艇) サンダーバード4号
④本体の改造・テスト
RC機器類を組込みますので、本体内部をスッキリさせての格納スペース確保です。
→ ニッパで、'チョキ・チョキ'・・・ での切り削りです。
●本体外部の底部分を補強します。 本体プラスチックが弱く感じましたので、1枚の板で補強しました。
→ 補強になるみたいですが、う〜ん・・・ なんか、変ですね (^^;
●浸水位置を高くしました。 水が入ってくる位置を、喫水線より少しでも高くしたいので、プラ板で囲んで装着しました。
→ 水上艇だから、こんなものかな (^^?
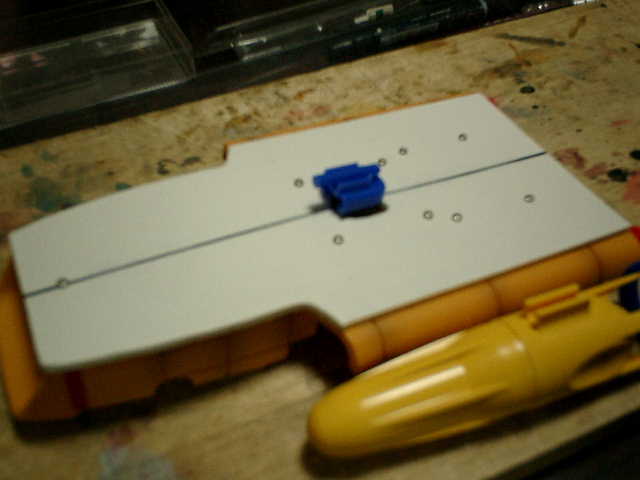
●試しに、ラジコン基盤ケースを入れてみます。
→ すき間の余裕がなく、'ギリ・ギリ'ですね (^^;
●ちゃんと、収まったかな?
→ おっ! 収まりましたです。(^^)
●本体のフタ?を載せてみました。
→ なんとか、フタ?が、できるみたいです。(^^)
・ ・ ・ ・ ・
●水中モータを連結装着する部分です。 吸盤方式での連結装着で行う事にしましたので、吸盤部分を板で押さえての装備です。
→ このままでは、弱い感じで・・・ 吸盤が外れないかな〜 (^^?
●試しに、水中モータを装着しました。
→ 'グニュ・グニュ'しながらの装着ですが・・・ ちょっと、不安定です。(^^;
●本体の固定脚を装着しました。 水中モータを装着したままで、本体を置けるように、左右に脚みたいな物を付けました。
→ なんか・・・ ゼンマイ仕掛けで、'ヨロ・ヨロ'と、歩いて動きそうだな〜 (^^;
●固定脚に補強です。 固定脚が、左右に'グラ・グラ'していましたので、1枚の板で補強しました。
→ う〜ん・・・ こんなものかな〜 (^^?
・ ・ ・ ・ ・
●水中モータ部分のパーツです。 水中モータの使用後は、微量の浸水がありますので、この溜まった水を抜いて乾かす為に 最先端部分に、弁当などに付いているソース又は醤油を入れている小さな容器のキャップ 部分を装着する事にしました。
→ 手元にある物を寄せ集めて作りますが・・・ 大丈夫かな (^^?
●ノイズ対策です。 モーターからのノイズを除去する為に、各端子からのリード線とモーター缶から延長した 金具間に、コンデンサをハンダ付けしました。
■モーター缶からの延長金具は、水中モータ付属している物をカットしての流用です。 ■使用コンデンサは、積層セラミックコンデンサ104(耐圧16V/0.1μF)です。
●水中モータの動作確認です。 ラジコンでの操作により、正常動作の確認ができましたが、スロットル全開では モータが悲鳴を挙げる感じです。これは、想定内ですが・・・(^^;
■ノイズ対策のコンデンサ未装着状態で、モータ回転させた場合は・・・ ステアリング・サーボが、勝手に、'ピク・ピク'と動いていましたので、モータからの ノイズが発生している感じです。 やはり、ノイズ対策は必須ですね!
●水中モータ部分の完成です。
→ 水上走行仕様ですが・・・ こんな簡単なもので、大丈夫かな (^^?
・ ・ ・ ・ ・
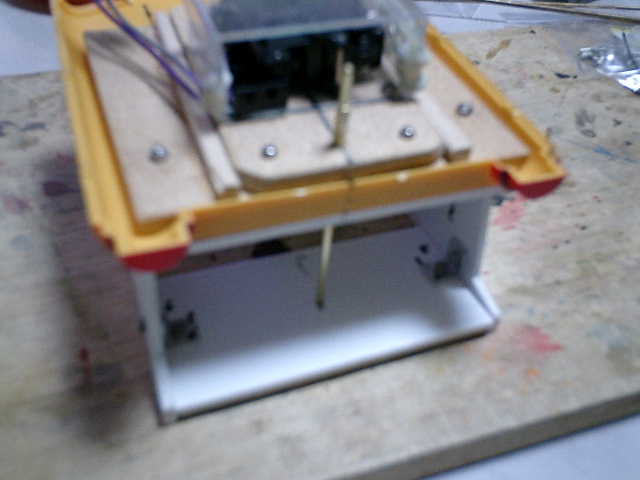
●舵ユニットを装着する土台作りです。 本体強度の補強も兼ねて、木材を使用して、お手軽に土台を作くる事にしました。
→ 位置固めの枠は、割り箸しを使用しました。(^^;
●サーボ台です。 土台から、サーボを取り外しできるように、サーボ台をネジ留めでの固定です。
→ 舵のリンケージ部分のスペースが狭いので・・・ ちょっと心配です。(^^;
●本体への装着確認です。 ラジコン基盤と一緒に装着しても、なんとか取り外しができそうです。
→ 全体的に、余裕スペースがありませんが、こんなものかな〜 (^^?
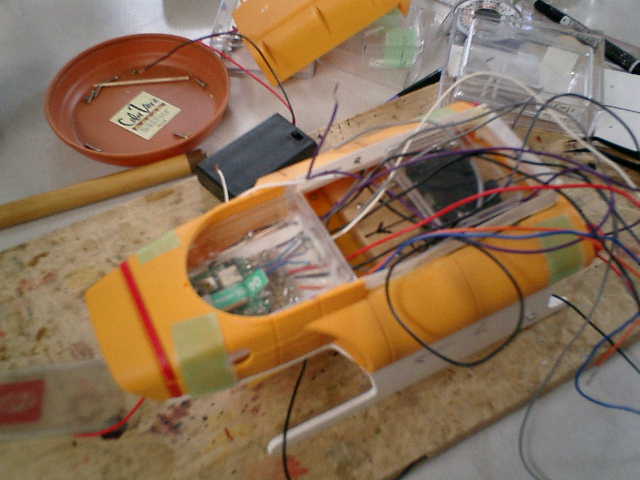
●各RC機器を、コネクターで接続です。 リード線群が邪魔になってきましたので、各RC機器を、コネクター接続する事にしました。
→ なんか、邪神(イリス)の触手みたいだな〜 'ニョロ・ニョロ'・・・ (^^;
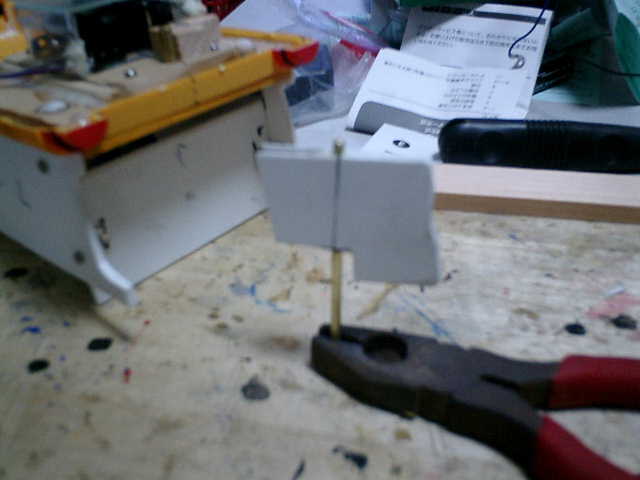
●舵軸の位置決めです。 本体側に、真鍮パイプを固定させ、このパイプの中に舵軸(真鍮棒)を通して可動させます。
→ この位置しかないな〜 リンケージをどうしようかな (^^?
●舵板のパーツ構成です。 2枚の板(低発泡塩ビ板)を使用して、1つの舵板を作る事にしました。
→ 薄い板なので、今にも、割れそうです。(^^;
●舵板の接着です。 2枚板の間に、真鍮棒を挟んで接着しています。
→ う〜ん・・・ 変な舵板だな〜 (^^;
●舵軸のリンケージ部分です。 スペース的な制約により、RC潜水艦で良く使用している、アジャスタヘッドを改造して クランクアーム(タミヤ製工作パーツより)へ直結にジョイントする様に作りました。
→ こんな物で、大丈夫かしら (^^?
・ ・ ・ ・ ・
●本体の接着です。
→ 接着箇所から浸水しないように、エポキシでの接着です。
●配線整備です。 リード線群とコネクターを、無理やり押し込めて、格納しましたです。(^^;
→ やっぱり、スペース的に、余裕がないな〜
●使用する電池です。 インドアレーサーは、車体内部に小型の充電池(ニッケル水素120mAh:3本)が装着 されていましたが・・・ 単4の充電池(4本)を使用して試す事にしました。(^^;
→ 電圧オーバーで、RC基盤が焼けるかも (^^? ちょっと、心配だな〜
●電池ボックス(スイッチ付き)の格納です。
→ 格納できましたが・・・ ’ギリ・ギリ’だな〜
●本体の上下部を合わせて、ナット留めする箇所です。
→ 外観は無視しましたです。(^^; う〜ん・・・
●ナットで留めました。
→ やっぱり、目立つな〜 ドンマイ・ドンマイ・・・
●なんとか、改造・組込みができました。 「宇宙大怪獣ギララ」の劇中で登場していた、宇宙船(アストロボート)形状な感じかも (^^?
→ これまた、変な物が、できちゃいましたです。(^^; う〜ん・・・
・ ・ ・ ・ ・
●お風呂での浮力確認です。 バランスが悪く、'フラ・フラ'と、浮いていて・・・ とても、不安定な感じです。
→ ちょっと、沈みすぎかな? 波を受けたら、転覆して沈没しそうだ! 嫌だな〜 (^^;
・ ・ ・ ・ ・
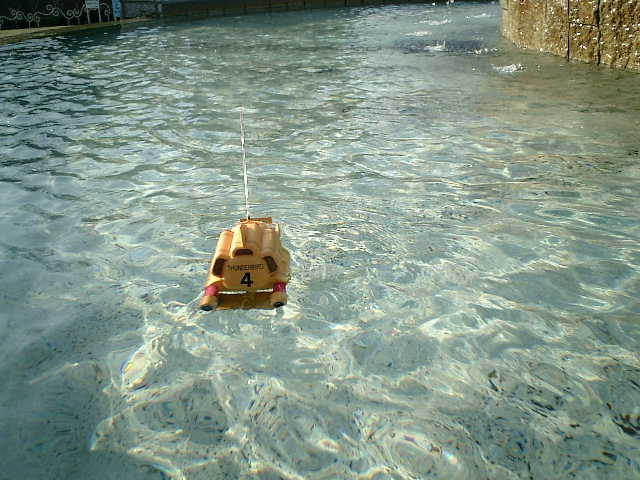
●公園の噴水で、試運転です。 受信機能が弱そうな感じでしたので、外部アンテナを拡張しての試運転です。
→ 水上艇ですが、沈没しないように・・・ 今日は、寒くて、水が冷たそうです。(^^;
●発進用意! 動力エンジン(水中モーター)を稼働せよ!
→ 動力エンジン(水中モーター)稼働しました。 発進準備 よ−し!
●発進!
→ よ−し!
●前方視界 良好!
→ よ−し!
●動力エンジン(水中モーター)全開せよ!
→ 了解しました! しかしながら、ノロノロ走行しか、できません!
●試運転の状況は・・・ ■舵の効きが悪く、サーボが、勝手に、'ピク・ピク'と動いてしまう。 → ポテンションメーター部分の変な配線が原因かもしれないな〜 ■少し走行させたら、操作不能(完全停止)状況になり、しばらくしたら、操作できる状態 になる事象が繰り返される。ラジコン基盤が壊れたかもしれません。 → 考え難いのだが、キャパシターが働いている? それとも、電圧オーバーなのか?
→ まともに動かないので・・・ まいったな〜 (^^;
・ ・ ・ ・ ・
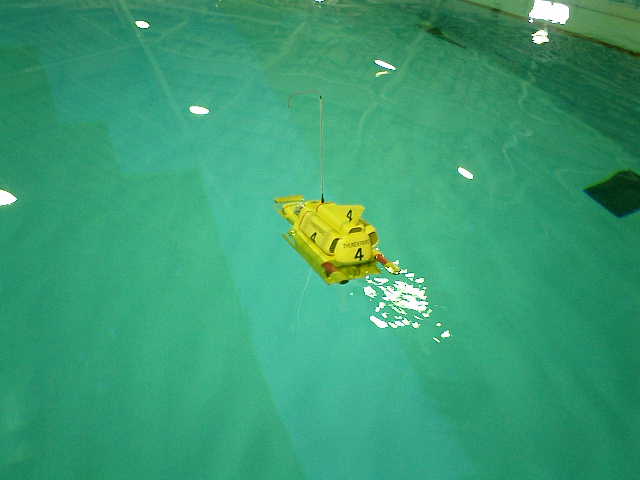
●'07水中ロボットコンベンション参加時に、走行させちゃいました。( 2007.03.24 )
→ こりゃ、大きくて、綺麗なプールだな〜 (^^)
●会場風景です。( 東京辰巳国際水泳場 )
→ 多くの来場者が、各コーナで見学しています。
●只今から、走行します。 配置に着け! 各部点検!
→ 動力エンジン(水中モーター)、発進用意よし
●発進!
→ う〜ん・・・ ラジコン操作の最長距離は、約5メートルぐらいが限界かな (^^?
・ ・ ・ ・ ・
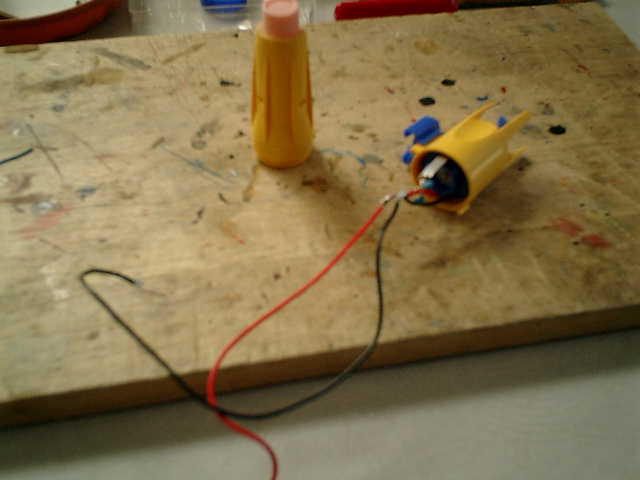
●水中モータの作り直しです。 水中モータの付属モータ( タミヤ製:FA-130タイプ )を使用していましたが、適正電圧が 1.5Vですので、悲鳴を挙げながらのモータ回転で、このまま使用していれば、何れ動か なくなる感じです。本来使用すべきRC機器と相性が良い、インドアレーサーに搭載してい た動力モータ(マブチ製:SH-030SAかな?)を使用しての作り直しを行う事にしました。
・モータのリード線 :青色(+)、黄色(−) ・モータ軸 :直径(約1.5ミリ) ・モータ軸調整パイプ :外径(2.1ミリ)内径(1.5ミリ) <ステンレスパイプ> ・ジョイント :内径(2ミリ) ・スクリュウ軸 :直径(2ミリ) <真鍮棒> ・スクリュウ軸受パイプ:内径(2ミリ) <銅パイプ>
●(新型)水中モーターの完成です。 外見からは大きな変化はありませんが、ある程度の浸水対策を考慮して、スクリュウ軸と 軸受パイプの接点(すき間)は、削りながらの微調整で段階的に合わせて作りました。
→ 内部に組み込んだモータ固定の位置決めが難しかったです。 微妙〜 (^^;
・ ・ ・ ・ ・
●単4の充電池(4本)を使用して、動作確認しましたら・・・ 試運転時に少し走行させたら、操作不能(完全停止)状況になり、しばらくしたら、操作で きる状態になる事象が繰り返される状態が試運転時に確認されていて、モータによる原因と 思われましたが、本来の充電池(3本)に戻して、再度の動作確認を行いましたら、これら の事象は発生しなくなりました。(^^)
→ 充電池(4本)では、電圧オーバーだったみたい (^^?
●充電池は、単3(3本)を使用する事にしました。
→ 最初から、これで、やっていれば良かったな〜 ドンマイ・ドンマイ・・・ (^^;
●本体に電池ボックスを配置しました。
→ 重量が少し重たくなった感じです。 スペース的に余裕がなくなったな〜 (^^;
・ ・ ・ ・ ・
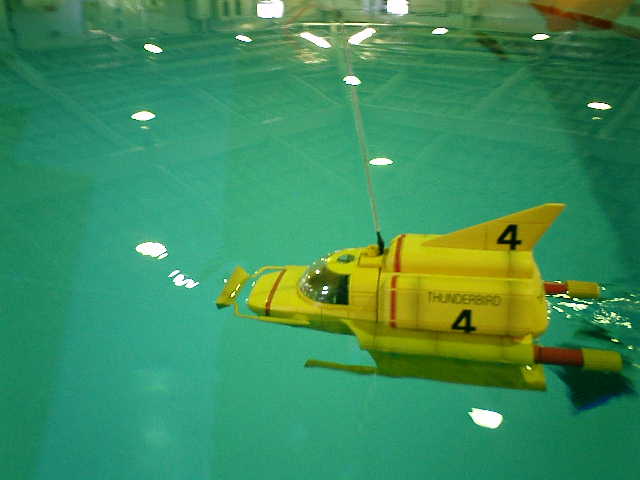
●新型動力エンジン(水中モーター)でのテスト走行です。 ( 2007.05.13 追浜・潜水訓練プール アクアモデラーズ・ミーティング )
→ 発進用意! 新型動力エンジン(水中モーター)を稼働せよ!
●新型動力エンジン(水中モーター)稼働しました。 発進準備 よ−し!
→ 発進!
●新型動力エンジン(水中モーター)稼働状態 異常なし!
→ よ−し!
●前方視界 良好!
→ よ−し!
●新型動力エンジン(水中モーター)全開せよ! よ−し!
・連続走行させていたら、一時的に操作不能(完全停止)状況になりなりましたが、しばら くしましたら操作できる状態になりました。発生頻度が少ないので耐えれるレベルです。 ・ラジコン操作の最長距離は、約5メートルぐらいが限界みたいですが、外部アンテナ(約 24センチ)を拡張してのラジコン操作では、プール全域範囲で使用できました。(^^)/
・ ・ ・ ・ ・
●テスト走行後のプチ改良です。 単3の充電池(3本)では、持続時間数的に良いのですが、浸水してくる位置を喫水線より 少しでも高くした方が良い感じですので、単4の充電池(3本)を使用して、少しでも重量 を軽くする事にしました。また、船体の重量バランスを安定させたいので、電池ボックスが 走行中に動かない様に、発砲スチロールを使用して簡単に枠組みしました。
→ こんな物で、大丈夫かしら (^^?
●完成で〜す。(^^)/ インドアレーサー・キット付属のプロポ(送信機)は、相性的には良いのですが、送信パワ ーが弱そうな感じですので、汎用的なプロポ(送信機)を使用しています。
→ なんか、変な、サンダーバード4号になりましたが・・・ これも有りかな (^^;