�i�@ �@����ޥ���� �@ �A�ԑ̉��� �@ �BDMD �@ �C�ԑ̏㕔 �@ �D���s �@�j
�y �T�^�T �y�[�W �z ���W�R����� �ŏI����ޏ��i �V���E�W �� ���� �j�́u�h�N�����T���ԁv
�D���s
�����^�]�́A��O�ő��s�����鎖�ɂ��܂����B
�@���@���̓��́A�V�C���������ׂ��B�i^^�j
�E �E �E �E �E
�������I�@���^�]����ׂ�I
�@���@�V���E�����I�@�������A�u�h�N�����T���ԁv���i���܂��B�i�M�L�j�U
�����C���E�G���W���i�d�����[�^�[�j�n���I
�@���@���i�I
�����C���E�G���W���i�d�����[�^�[�j�ғ���ԁ@�ُ�Ȃ��I�@��|���I
�@���@�Ȃ�Ƃ����s�ł���݂������ȁ`�@���^�]���s�Ƃ��ẮA�n�j���ׂ��B�i^^�j
���V���E�����I�@�����́A�h�N���������@(^^�H
�@���@�Ⴄ�ׂ�@�����́A���n�ꂾ�ׂ��I�@(^^�G
�E �E �E �E �E
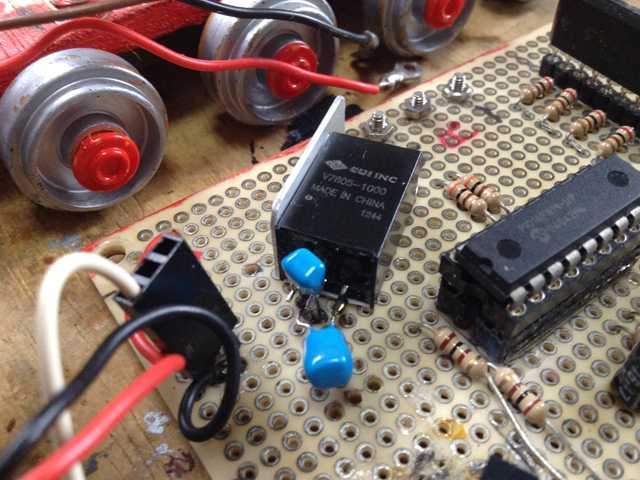
�����s��̊��z�E�E�E ������ɒ�~���āA�����Ȃ��Ȃ�܂����B ���̂��A����ɒ�~���ē����Ȃ��Ȃ�A���炭����ƁA�����悤�ɂȂ鎖�ۂ��������� �����B�g���݃v���O�����̖\����h���̂ɁA�E�H�b�`�h�b�N�^�C�}�i�v�c�s�j�̓������ ���Ă���A�v�c�s�N���A�̃^�C�~���O���d�_�ɕ��͂��܂��������v�Ȋ����ł��B���� ��̓d���d���Ɠ��ʃ`�F�b�N�ȂǂŐF�X�Ǝ����Ă݂��Ƃ���A�d���R���f���T�̒[�q�� �ӂ��s����ȏ�Ԃł����̂ŁA�d���R���f���T�{�̂����⋭�Œ肵�܂�����A���� ���ۂ��������܂����ł��B�d���R���f���T�{�̂ɓ����Ă���[�q�ړ_���s���肩�� (^^�H �����M�n���ł��Ȃ��ł��B �e�X�g�{�[�h�̎��s�ԑ̂ł͒��M�n����͂ł���̂ł����A���̎ԑ̂�n�ʂɒu���ē��� ���ƁA���M�n����̓�����n�߂悤�Ƃ��܂����A��~���Ă��܂��܂��B(^^�H �l�`�w�p���[���Ⴂ��������܂����A�ǂ����ԑ̏d�ʂ��d�������ɂ�蒴�M�n���� ���Ȃ������ł��B��荇�������ʂ̐M�n���ł��܂��̂ŁE�E�E(^^�G
�E �E �E �E �E
���v���|�i���M�@�j�̂c�l�c����w���G���A�\����ύX���܂����B ���W�R������Œ��M�n����̓���ɂȂ������́A�ςȊ����ł��̂ŁE�E�E ���M�n����@�\����菜�����ɂ��܂����B
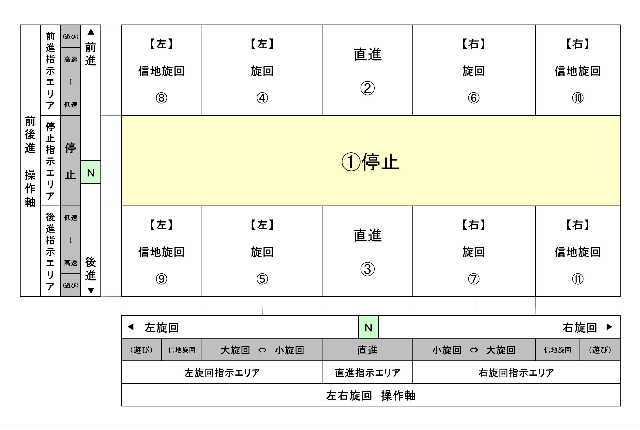
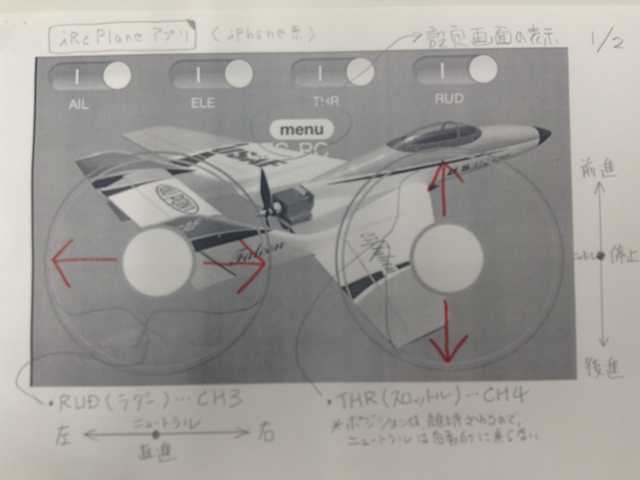
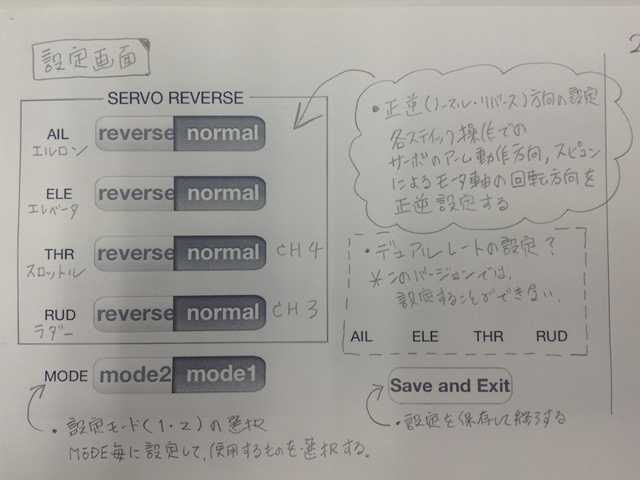
���v���O�����̃o�[�W�����t�o�H�ł��B -------------------------------------------------------------------------------- �E�j���[�g�����ʒu�E�E�E�y �X�e�C�b�N�F�ʼn��� �z�y �g�����F�ŏ㕔 �z -------------------------------------------------------------------------------- �E�c�s�a�u�`�Q�O�P ( �u�d�q �`�Q.�O�P )�@���ǔŁ@���M�n����@�\��� �@�@�@�i�@�o�͓d���@�E�O�i���F ��1.2V �` 2.3V�@�E��i���F ��-1.2V �` -2.2V�@�j -------------------------------------------------------------------------------- �@���@���̎ԑ̂ł́A���M�n����̓��삪�ł��Ȃ��̂Ŏd���Ȃ��ł��B(^^�G
���o�h�b�����O���āA�V���ȉ��ǔŃv���O�������������݂܂����B
�@���@���̂܂ɂ��A����Ȏ����o����悤�ɂȂ�܂����ł��B�G�w�w�E�E�E�i^^�j
�E �E �E �E �E
���u ������ԃI�t��Q�O�O�X �v�ɎQ�����܂����B�i2009.12.06�j
�E �E �E���ɁA�ƂĂ���������ԂȂǂ��Q�����Ă��܂����B �E �E
���F���Ƒ��̒T���ԁi�W���C�A���g)
���o���_�C �A�|��12�����ʑ��s��
�E �E �E �E �E
�����d�ɂ��u��̓��̒T���ԁv�R���e�X�g�ɎQ�����܂����ł��B
�@�� �F����̍�i�́A�Ƒn�I�ȃA�C�f�A�����荞�܂�Ă��āA�ƂĂ����ɂȂ�܂��B
�E �E �E �E �E
���v���Ԃ�ɁA�V�ڂ��Ƃ�����E�E�E �ŏ��͓����̂ł����A���炭����ƁA�����Ȃ��Ȃ�܂��B�@(^^�G �R�[�q���M�����[�^�[���M���Ȃ�A�d�͋����n���s����ɂȂ��Ă��銴�������܂��B ���M�K�v�ł����A���܂荂�M�ɂȂ�Ȃ��uDC-DC�R���o�[�^�v�Ɍ������܂����B �y �X�[�p�[�R�[�q���M�����[�^�@V7805-1000(DCDC) �z
�@���@��≏�^DC-DC�R���o�[�^���A���߂Ďg�p���܂����A���v������@(^^�H
���v���O�������C�����܂����B �d�͋��������肵�������ł��̂ŁA�o�̓p���X���l�̔������ł��B -------------------------------------------------------------------------------- �E�j���[�g�����ʒu�E�E�E�y �X�e�C�b�N�F�ʼn��� �z�y �g�����F�ŏ㕔 �z -------------------------------------------------------------------------------- �E�c�s�a�u�`�Q�O�Q ( �u�d�q �`�Q.�O�Q )�@���ǔ� �@�@�@�o�̓p���X���l�e�[�u���i�o�n�t�s�F�o�̓p���X���l�j�̒����C�� --------------------------------------------------------------------------------
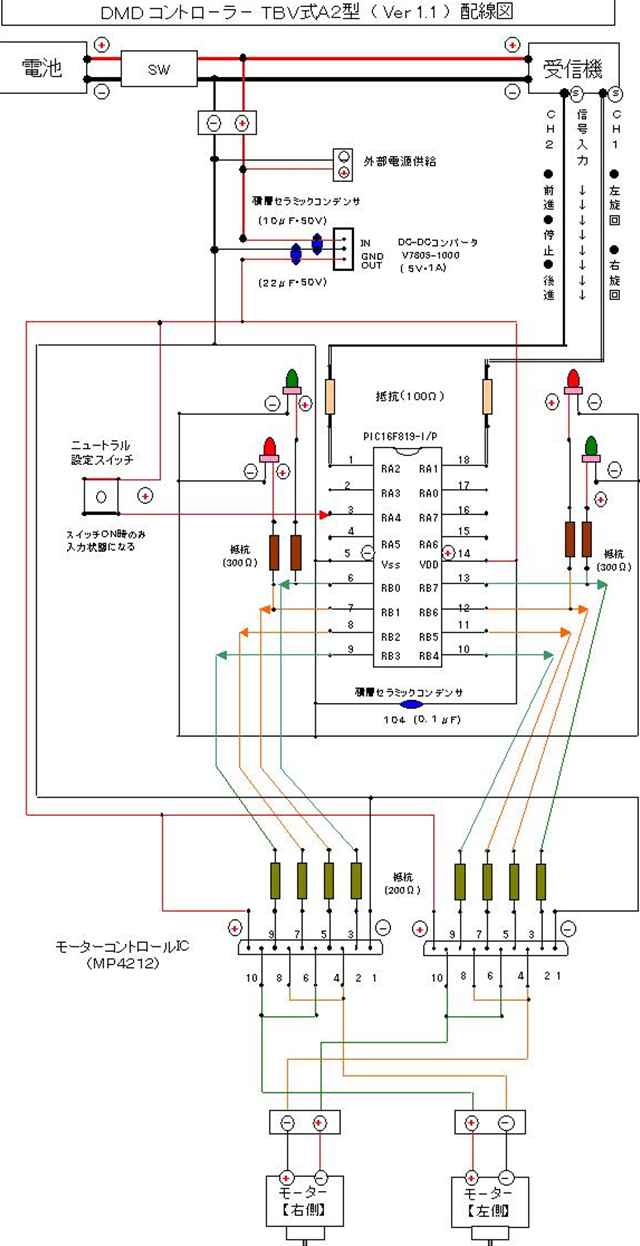
���z���}�ł��B
�d���R���f���T�́A��菜���܂����B �@���@���̏�ԂŁA���炭�A�l�q�����邱�Ƃɂ��܂��B
�����[�^��]���s����ɂȂ�܂����B ����c�l�c�쐬�̏����i�K���́A���[�^���ׂ��|���Ẵe�X�g�ł����B ���낻����������ł��̂ŁA���[�^�������܂����B �y �g���N�`���[��2���[�^�[ �z
�E�K���d�� �F 2.4-3.0V �E�������׃g���N�F 1.6-2.0mN�m �E��]��RPM �F 12300-14700r/min �E����d�� �F 1.7-2.0A
�E �E �E �E �E
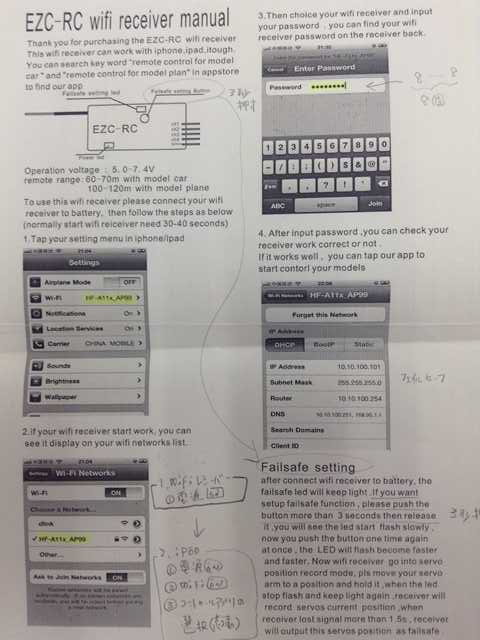
��WIFI���V�[�o�[���g�p�������̂ŁA���s���邱�Ƃɂ��܂������E�E�E
�����c�A�v���ł��B
���v���O�����̊T�v�ł��B ;****************************************************************************** ;* ���v���O���� �F �c�s�a�u�a�P�O�R ( �u�d�q �a�P.�O�R ) ������F�l�o�`�r�l ;* ���c�l�c�R���g���[���[�s�a�u���a�^�@�l�o�S�Q�P�Q���ځ@���ǔ� ;****************************************************************************** ;���v�h�e�h���M�@�S�`�����l���g�p ;�@�E�O�i�F�@ 1.6V��1.8V��2.4V ;�@�E��i�F�@ 1.6V��1.8V��2.4V ;����M�@�iEZC-RC 4ch WIFI Receiver�j ;�@�EEZC-RC�Ё@WIFI���V�[�o�[�@4CH�d�l�@for�@iPhone��iPad��Android ;�����c�A�v���iiPhone, iPad, and iPod touch�j ;�@�Eremote control for model plane by AP ;�����M�n����͕s�p�ɂ���菜���Ă��� ;�@�E���M�n����́A�M�n����̐ݒ�����Ă��� ;�b�g�R�FINPUT2����M�@�@�y�v���|�E�F�㉺����z�O��i���쎲 ;�b�g�S�FINPUT1����M�@�@�y�v���|���F���E����z���E���쎲 ;****************************************************************************** ; �y PIC16F819 �z ; _______ ________ ;�y�v���|�E�F�㉺����z�@| V |�y�v���|���F���E����z ; | | ; ��M�@�� �AINPUT2 >--+ 1 RA2 | RA1 18 +--< �@INPUT1����M�@ ; <--+ 2 RA3 | RA0 17 +--> ;�j���[�g�����ݒ���� >--+ 3 RA4 | RA7 16 +--> ; <--+ 4 RA5 | RA6 15 +--> ; 0V --+ 5 Vss | Vdd 14 +-- 3�`5V+ ; �AFWD <--+ 6 RB0 | RB7 13 +--> �@FWD ; �ABACK <--+ 7 RB1 | RB6 12 +--> �@BACK ; �AFWD .STOP<--+ 8 RB2 | RB5 11 +--> �@FWD .STOP ; �ABACK.STOP<--+ 9 RB3 | RB4 10 +--> �@BACK.STOP ; | | ; +----------------+ ;�@�@�@�@�i�E�N���b�N���g���F�S�l�g���@�E�d���d���F�T�D�O�u�j ;******************************************************************************
�����s���܂������E�E�E
������x�̃��x���Ŏg�p�ł����̂ł����E�E�E�@�m�f�ł��ˁ@(^^�G �E�v���O�����Ŏ擾�����p���X���l�̐��ڂ��A��Ⴕ���l�ŕϓ����Ȃ��B �E���c�A�v���̃^�b�`���슴�G�����o�I�ɓ���߂Ȃ��B�i�育�������Ȃ��j �E���c�A�v���Ƀg�������Ȃ��̂Ŕ��������ł��Ȃ��B�i�v���O�����Ή��ł��邪�j �E���̑��c�A�v�����A������g�p�ł���̂��s���B�i���Ƀ_�E�����[�h�ł��Ȃ��j
�E �E �E �E �E