乮丂 嘆僥僗僩儃乕僪偺惢嶌 丂 嘇帋峴僾儘僌儔儉 丂 嘊僉儍僞憱峴 丂乯
仠俢俵俢僐儞僩儘乕儖乮 俀僠儍儞僱儖庴怣婡梡 乯帋峴僾儘僌儔儉
嘇帋峴僾儘僌儔儉
俀偮偺僗僺僐儞婎斅傪丄侾偮偵崌懱偝偣偨僥僗僩儃乕僪忋偱丄摦偐偡偙偲 乮曄懃揑側僗僺僐儞僾儘僌儔儉偱乯偑偱偒傑偟偨偺偱丄偙傟偐傜丄帋峴嶖 岆傪孞傝曉偟側偑傜丄俢俵俢帋峴僾儘僌儔儉嶌傝傊杮奿揑偵拝庤偱偡丅
丒 丒 丒 丒 丒
仠戞係抜奒丒帋峴乮拞娫斉嘋乯僾儘僌儔儉偺嶌惉偱偡丅 捈恑偺摦嶌乮慜恑丒掆巭丒屻恑乯偱偁傞僗僺僐儞婡擻偺儌乕僞乕夞揮椡惂屼傪拞妀偲偟 奼挘婡擻偲偟偰丄俀偮偺儌乕僞乕偵懳偟偰乮惓揮丒斀揮乯夞揮曽岦傪惂屼偡傞暘棧揑側 婡擻傪摑崌壔偡傞張棟曽幃傪丄婎杮揑峫偊曽偲偟偰帋峴僾儘僌儔儉傪嶌傝傑偟偨丅 -------------------------------------------------------------------------------- 丒僯儏乕僩儔儖埵抲丒丒丒亂 僗僥僀僢僋丗嵟壓晹 亃亂 僩儕儉丗嵟忋晹 亃 -------------------------------------------------------------------------------- 丒侾俇俥俉侾俋俢俵俢俿俤俽侽係乮 倁俤俼 侽侽侽係 乯丂拞娫斉嘋 丂丂丂丂乮丂嵟戝弌椡揹埑丂丒慜恑帪丗俀丏侽倁丂丒屻恑帪丗亅侾丏俋倁丂乯 --------------------------------------------------------------------------------
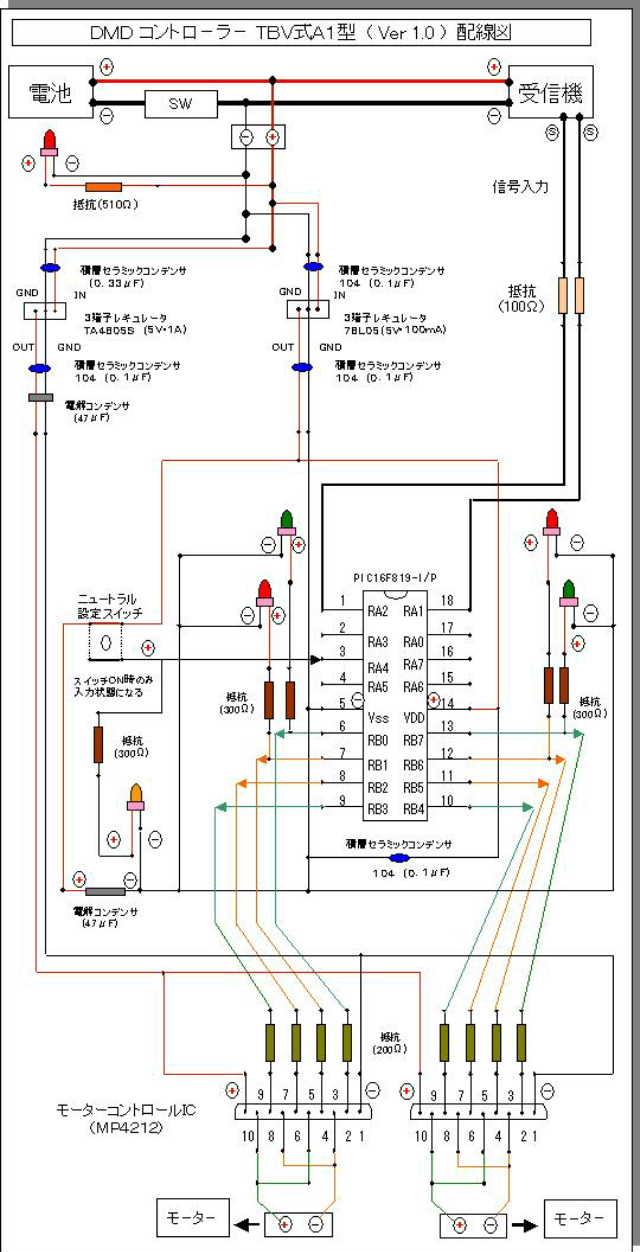
仠攝慄恾偱偡丅 俀偮偺僗僺僐儞婎斅傪丄侾偮偵崌懱偝偣偰廤栺偟偨姶偠偱偡丅
丂仺丂偙傫側丄攝慄偱丒丒丒丂俢俵俢偲偟偰丄戝忎晇偐偟傜丂(^^丠
仠僾儘億乮憲怣婡乯偺俢俵俢憖嶌巜帵僄儕傾峔惉偱偡丅 俀偮偺僗僥僀僢僋憖嶌乮慜屻嵍塃乯曽岦偵崌傢偣偰丄廲幉偵慜屻恑憖嶌幉丄墶幉偵嵍塃慁 夞憖嶌幉偺岎揰傪廤崌偝偣偰丄偦傟偧傟偺摦嶌傾僋僔儑儞傪攝暘偟丄曽宍偵暲傋偨峔惉偱 侾偮偺儅僩儕僢僋僗忬偵偟偰丄俢俵俢憖嶌巜帵僄儕傾撪偺嫬奅慄(巇愗抣)傪寛傔傑偟偨丅 憖嶌僀儊乕僕偵崌傢偣偨峔惉偵偟偨偮傕傝偱偡偑丒丒丒丂偙傫側傕偺偐側 (^^丠
俀偮偺怣崋擖椡偐傜丄偦傟偧傟偺擖椡僷儖僗暆傪嶼弌偟偰丄偙偺俢俵俢憖嶌巜帵僄儕傾峔 惉偵弨偠偰丄奺摦嶌傾僋僔儑儞張棟傪僾儘僌儔儈儞僌偟偰慻傒崬傒傑偟偨丅 丂仺丂偙偺儅僩儕僢僋僗偼丄俀師尦偱偡偑丒丒丒丂摢偺拞偼丄堎師尦忬懺偱偟偨丅(^^丟
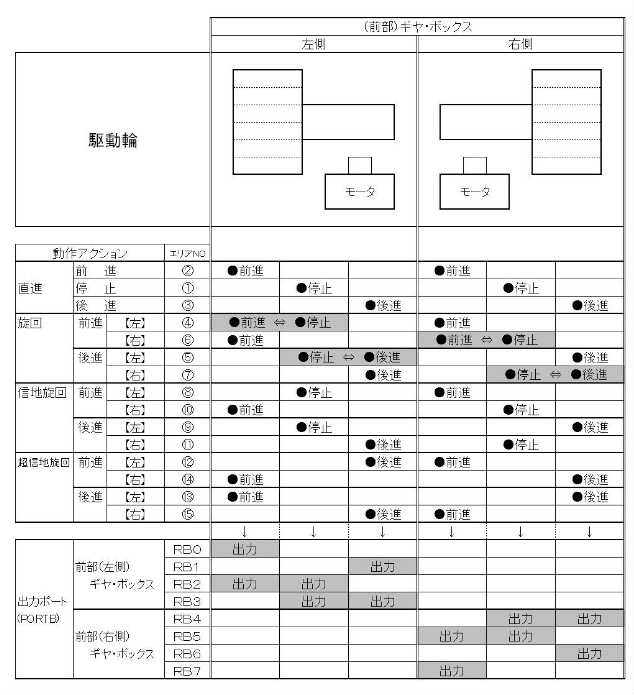
仠俢俵俢摦嶌傾僋僔儑儞偺弌椡億乕僩乮俹俷俼俿俛乯峔惉偱偡丅 慜屻恑憖嶌偲掆巭憖嶌偱偼丄僗僺僐儞偲摨條偵丄怣崋擖椡(擖椡僷儖僗暆)偵懳墳偡傞弌椡 僷儖僗暆傪愝掕偟偰儌乕僞乕夞揮椡惂屼偟傑偡偑丄峏偵丄嵍塃慁夞憖嶌偑壛傢傝恑峴曽岦 傪憖傞丄俀偮偺儌乕僞乕偵懳偟偰乮惓揮丒斀揮乯夞揮曽岦傪惂屼偡傞偵偼丄壓婰偺僷僞乕 儞峔惉偵弨偠偰丄奺摦嶌傾僋僔儑儞張棟傪僾儘僌儔儈儞僌偟偰慻傒崬傒傑偟偨丅
仏晛捠偺慁夞摦嶌偱偼丄慁夞曽岦偺撪椫懁傪僞僀儈儞僌傪寁傝側偑傜悘帪掆巭偝偣傑偡丅
丒 丒 丒 丒 丒
仠僥僗僩儃乕僪忋偱偺俢俵俢帋峴僾儘僌儔儉偺摦嶌妋擣偱偡偑丒丒丒 俢俵俢揑側丄摦嶌偑丒丒丒丂'側傫偲側偔'丄偱偒偨姶偠偱偡丅乮^^乯
丒 丒 丒 丒 丒