乮丂 偼偠傔偵 丂 俙宆 丂 俛宆 丂 俠宆 丂 俢宆 丂 俤宆 丂 俥宆 丂乯
仠僗僺僐儞乮俀僠儍儞僱儖庴怣婡梡乯帋峴僾儘僌儔儉
亂俛宆亃帋峴僾儘僌儔儉丂亅 榑棟儌僕儏乕儖壔偺懳墳 亅
揹巕宯偺抦幆偑側偔丄揔摉側姶妎偱偺廋惓偱丄俙宆僾儘僌儔儉傪嶌傝傑偟偨偑丄僾儘僌儔儈 儞僌偵傕嫽枴偑偁傝傑偡偺偱丄慡懱揑側張棟偺棳傟傪攃埇偟傛偆偲巚偄丄媣偟傇傝偵俹俬俠 娭學偺嫵杮傪撉傒傑偟偨偑丒丒丒 偳偆傕嬯庤側暘栰側偺偱丄偲偰傕擄偟偔姶偠傑偡丅(^^丟
丂仺丂傑傞偱丄帋尡曌嫮傒偨偄側丒丒丒丂栭怘偼丄僠僉儞儔乕儊儞偑丄偄偄側乣丂(^^丟
丒 丒 丒 丒 丒
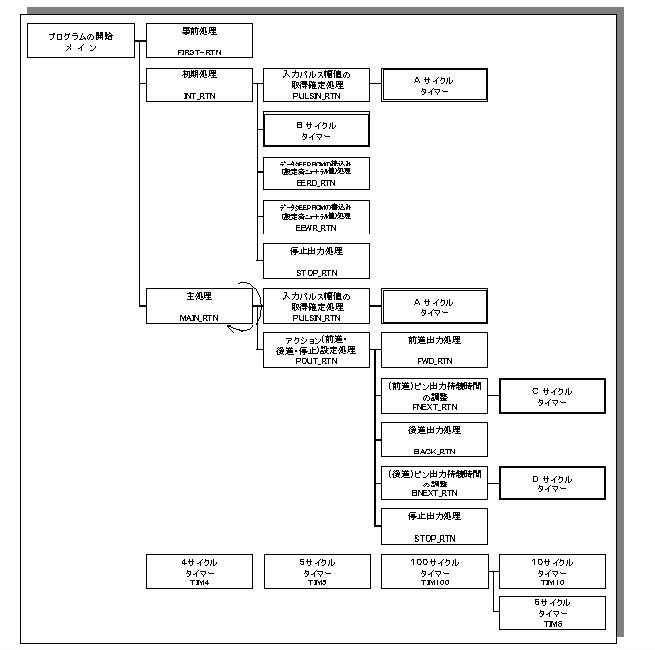
仠僾儘僌儔儉峔憿恾 尰忬偺僾儘僌儔儉偱傕椙偄偺偱偡偑丄僾儘僌儔儉撪傪婔搙傕挱傔側偑傜帺暘側傝偵棟夝偟偰 惍棟傪峴偄丄帺暘帺恎偑庢傝埖偄偟傗偡偄條偵僾儘僌儔儉撪傪峔憿壔偡傞帠偵偟傑偟偨丅
巊梡俹俬俠偺巇條偱偼丄屇傃弌偟柦椷乮俠俙俴俴乯傪棙梡偟偨帪偵丄屇傃弌偟尦偵栠傞堊偺 傾僪儗僗傪偟傑偆堊偺僗僞僢僋儊儌儕偑俉儗儀儖傑偱偁傝傑偡偑丄妱傝崬傒帪偵侾儗儀儖巊 偄傑偡偺偱丄幚嵺偵偼俈儗儀儖傑偱偲側傝傑偡丅偙偺惂栺乮嵟戝俉儗儀儖乯傪峫椂偟偰丄奒 憌峔憿壔偱偺榑棟儌僕儏乕儖暘妱傪峴偭偰偄傑偡丅
丒 丒 丒 丒 丒
仠僗僺乕僪僐儞僩儘乕儔乕丂俵俹係俀侾俀搵嵹丂亂俛宆亃帋峴僾儘僌儔儉偱偡丅 僾儘僌儔儉峔憿偺慻傒捈偟偵傛傝丄怴偨偵丄僙僢僥僀儞僌偑昁梫偱偡偺偱俙宆僾儘僌儔儉偲 摨條偵僾儘僌儔儉撪偺抶墑張棟傪梡偄偰丄俹俬俠弌椡僺儞傊偺揹婥傪棳偡弌椡帪娫挷惍偵敽 偆丄僾儘僌儔儉廋惓傪庤扵傝偱峴偄側偑傜丄彫僷儚乕偺斈梡揑側儌乕僞乕巇條乮揔惓揹埑側 偳乯枅偵丄屄乆偺俛宆僾儘僌儔儉傪嶌偭偰傒傑偟偨丅 仭僯儏乕僩儔儖埵抲丒丒丒亂 僗僥僀僢僋丗僙儞僞乕 亃亂 僩儕儉丗僙儞僞乕 亃 丂丂------------------------------------------------------------------------------ 丂丂丒俽俹俠俛侾俆侽侽乮 倁俤俼 俛侾俆.侽 乯丂侾.俆倁儌乕僞梡丂婎杮斉 丂丂丂丂乮丂嵟戝弌椡揹埑丂丒慜恑帪丗侾丏俆倁丂丒屻恑帪丗亅侾丏俆倁丂乯 丂丂------------------------------------------------------------------------------ 丂丂丒俽俹俠俛俁侽侽侽乮 倁俤俼 俛俁侽.侽 乯丂俁.侽倁儌乕僞梡丂婎杮斉 丂丂丂丂乮丂嵟戝弌椡揹埑丂丒慜恑帪丗俁丏侽倁丂丒屻恑帪丗亅俁丏侽倁丂乯 丂丂------------------------------------------------------------------------------ 丂丂丒俽俹俠俛係俆侽侽乮 倁俤俼 俛係俆.侽 乯丂係.俆倁儌乕僞梡丂婎杮斉 丂丂丂丂乮丂嵟戝弌椡揹埑丂丒慜恑帪丗係丏係倁丂丒屻恑帪丗亅係丏係倁丂乯 丂丂------------------------------------------------------------------------------ 丂丂丒俽俹俠俛俆侽侽侽乮 倁俤俼 俛俆侽.侽 乯丂俆.侽倁儌乕僞梡丂婎杮斉 丂丂丂丂乮丂嵟戝弌椡揹埑丂丒慜恑帪丗俆丏侽倁丂丒屻恑帪丗亅俆丏侽倁丂乯 丂丂------------------------------------------------------------------------------
丒 丒 丒 丒 丒
俹俬俠弌椡僺儞傊偺弌椡帪娫挷惍偵敽偆丄抶墑張棟偼丄僒僀僋儖扨埵偱幚峴偝偣偰挷惍偟偰 偄傞偺偱偡偑丄偳偺掱搙偺悢抣儗儀儖側偺偐丠丄嫽枴偑偁傝傑偡偺偱丄寁嶼偟偰傒傑偟偨丅 仠抶墑搙崌偄乮張棟幚峴懍搙乯偼丠丒丒丒丂偙偺俹俬俠偼丄係MHz乮僋儘僢僋乯側偺偱 丂仭係MHz偱丄侾僋儘僢僋偵妡偐傞帪娫偼 丂丂丒侾僋儘僢僋偺帪娫丂亖丂侾 乛 僋儘僢僋 亖 侾 乛 係MHz 亖 侽.俀俆兪sec 丂仭俹俬俠偺僋儘僢僋係廃婜暘偑丄侾僒僀僋儖傒偨偄偱偡偺偱 丂丂丒侾僒僀僋儖偺帪娫 亖 侾僋儘僢僋偺帪娫 倃 侾僋儘僢僋偺廃婜 丂 亖 侽.俀俆兪sec 倃 係廃婜 亖 侾兪sec 丂丂丂丂仺丂侾僒僀僋儖偺幚峴懍搙偼丄侾兪sec乮0.000001昩乯 偵側傝傑偡丅 丂 仏 1昩乮sec乯亖 1,000,000儅僀僋儘昩乮兪sec乯 侾 乛 1,000,000昩扨埵儗儀儖偱丄抶墑張棟偺挷惍傪峴偭偰偄傞帠偵側傝傑偡丅 儈僋儘偺寛巰寳傒偨偄側丄旝彫悢帤偱偡偑丒丒丒丂偙傫側寁嶼幃偱丄戝忎晇偐偟傜丂(^^丠
丒 丒 丒 丒 丒
抶墑張棟偺僾儘僌儔儉撪愝掕偑丄埖偄傗偡偔側偭偨姶偠側偺偱偡偑 (^^丠丂儉儉儉丒丒丒
丒 丒 丒 丒 丒