乮丂 偼偠傔偵 丂 俙宆 丂 俛宆 丂 俠宆 丂 俢宆 丂 俤宆 丂 俥宆 丂乯
仠僗僺僐儞乮俀僠儍儞僱儖庴怣婡梡乯帋峴僾儘僌儔儉
亂俠宆亃帋峴僾儘僌儔儉丂亅 揹埑俇倁弌椡壔偺懳墳 亅
俛宆僾儘僌儔儉偱丄俇倁儌乕僞梡傪嶌傠偆偲偟傑偟偨偑乮俙宆宯偼弌椡晄懌乯丄僾儘僌儔儉 撪偺抶墑張棟偺傒偱偼丄僙僢僥僀儞僌偑擄偟偄偦偆側姶偠偱偟偨偺偱丄俛宆僾儘僌儔儉偺俁 倁儌乕僞梡乮俽俹俠俛俁侽侽侽乯傪婎杮僾儘僌儔儉偲偟偰丄怴偨偵丄弌椡僷儖僗暆抣偺嶼弌 張棟偱偺僙僢僥僀儞僌偱丄俹俬俠弌椡僺儞傊偺僷儖僗暆弌椡偺挷惍偵敽偆丄僾儘僌儔儉廋惓 傪庤扵傝偱峴偄側偑傜丄俇倁儌乕僞愱梡偲偟偰俠宆僾儘僌儔儉傪嶌傞帠偵偟傑偟偨丅 弌椡僷儖僗暆偺抦幆偑側偔丄揔摉側姶妎偱偺僙僢僥僀儞僌偲側傝傑偟偨偑丄帺暘側傝偵夝庍 偟偰偺壖愢傪棫偰偨忬嫷壓偱偺僾儘僌儔儈儞僌懳墳偵傕嫽枴偑偁傝傑偡偺偱丒丒丒(^^丟
丒 丒 丒 丒 丒
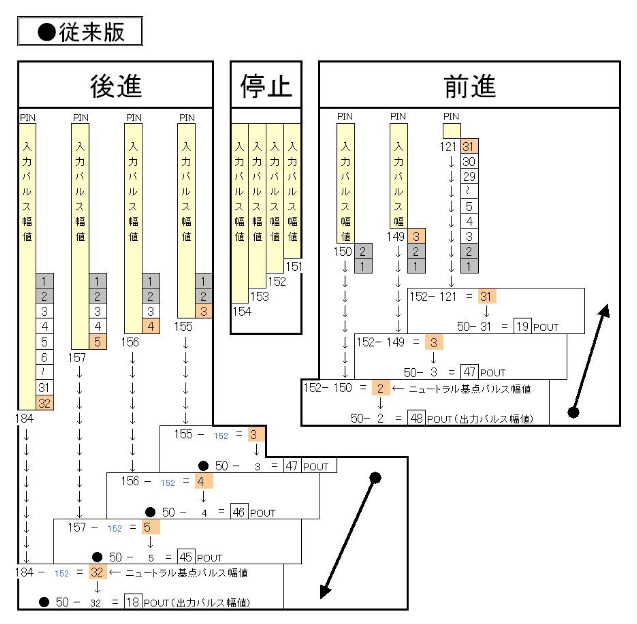
仠乮廬棃斉乯弌椡僷儖僗暆抣偺悇堏僀儊乕僕恾 帺暘側傝偺夝庍偱偼(^^丟丒丒丒 俙宆偲俛宆宯偺僾儘僌儔儉偼丄偙傫側姶偠偱悇堏偟傑偡丅
擖椡僷儖僗暆抣偵懳偟偰丄嶼弌婎弨學悢乮俆侽乯偵傛傝丄弌椡僷儖僗暆抣傪嶼弌偟偰偄傑偡丅
丒 丒 丒 丒 丒
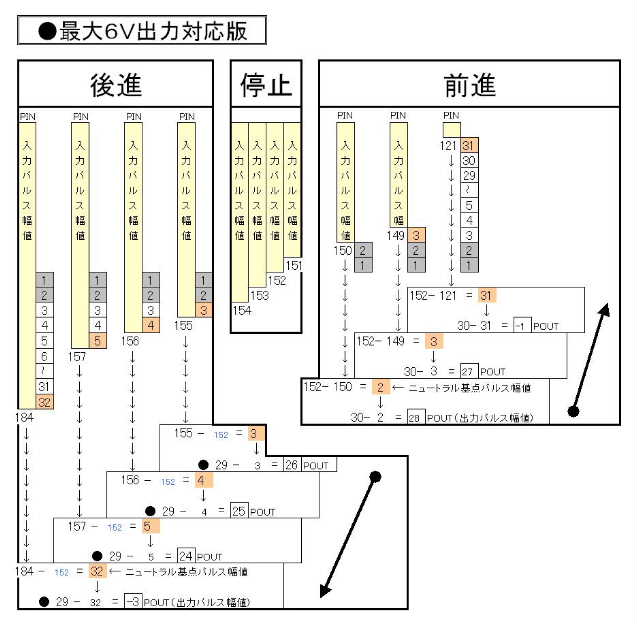
仠乮嵟戝俇倁弌椡壔懳墳斉乯弌椡僷儖僗暆抣偺悇堏僀儊乕僕恾 俙宆偲俛宆宯偺僾儘僌儔儉偱偺僙僢僥傿儞僌偱偼丄僾儘僌儔儉撪偺嬻張棟乮偍偍傑偐側僞僀 儅乕張棟乯傪梡偄偰丄嵟戝弌椡揹埑偵嬤偯偗傞挷惍曽朄偵傛傝丄扨撈僷僞乕儞偱寛傑傞姶偠 偱偡偑丄偙偺弌椡僷儖僗暆抣偱偺僙僢僥傿儞僌偱偼丄媮傔傞嵟戝弌椡揹埑偵嬤帡偡傞働乕僗 偑暋悢僷僞乕儞偱摿掕偱偒傑偟偨丅偙傟傜偺暋悢岓曗偐傜慖弌偲側傝傑偟偨偺偱丄僙僢僥傿 儞僌偲偟偰偺慖戰巿偑丄怴偨偵丄憹偊偨帠偵側傝傑偡丅 傑偨丄摿掕偺暋悢僷僞乕儞偼丄屄乆偵摿惈乮僋僙乯偑偁傝傑偡偺偱丄偙偺摿惈乮僋僙乯孹岦 傪堄幆偟側偑傜偺慖戰偑峴側偊傑偟偨丅偙傟偵傛傝丄僾儘億偺僗僥傿僢僋偵傛傞傾僋僙儖憖 嶌偵斀墳偡傞儌乕僞乕夞揮偺嫮庛摦嶌偑丄帺暘岲傒偺僙僢僥傿儞僌偵巇忋偑偭偨姶偠偱偡丅
嶼弌婎弨學悢(慜恑:29,屻恑:30)偱偺愝掕偲側傝丄弌椡僷儖僗暆抣偼掅抣偐傜偺奐巒偱偡丅 丂仺丂寁嶼傕偺偼丄偲偰傕嬯庤偱偡偺偱丒丒丒丂寢壥僆乣儔僀偱偡偹丂(^^丟
丒 丒 丒 丒 丒
仠僯儏乕僩儔儖愝掕偺庤摦憖嶌丒丒丒丂'偆偭偐傝'朰傟懳墳偱偡丅(^^丟 僗僺僐儞偺僙僢僥傿儞僌偵敽偄丄婔搙傕怴偟偄僾儘僌儔儉傪梡偄偰僥僗僩幚巤傪孞傝曉偟傑 偡偑丄偦偺嵺偵丄俹俬俠偵慻傒崬傫偩僾儘僌儔儉乮枹巊梡乯傪嵟弶偵巊梡偡傞応崌偵丒丒丒 '偆偭偐傝'偲僯儏乕僩儔儖愝掕傪朰傟偰偟傑偭偰丄婲摦屻丄彑庤偵丄屻恑摦嶌偟偰朶憱揑側 帠徾偑婲偙偭偰峇偰傑偡丅庤摦憖嶌偱偺僯儏乕僩儔儖愝掕偼昁恵側偺偱偡偑丄偙偺忬嫷傪夞 旔偡傞堊偵丄僯儏乕僩儔儖偺徣棯抣乮侾俆俀乯傪僾儘僌儔儉撪偱愝掕偡傞傛偆偵偟傑偟偨丅
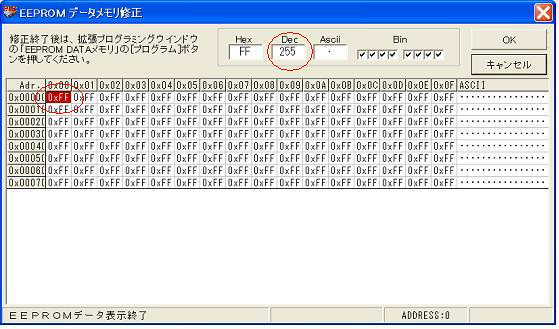
仠俹俬俠撪晹乮俤俤俹俼俷俵乯偺僨乕僞撪梕偱偡丅 偙偺僾儘僌儔儉偱偼丄娙棯壔偵傛傝擖椡僷儖僗暆抣傪侾僶僀僩乮8宿乯偱丄庢傝埖偭偰偄 傑偡偺偱丄偙傟偵敽偄丄僯儏乕僩儔儖抣傕摨條偵侾僶僀僩乮8宿乯偱偺巊梡偵側傝傑偡丅 僯儏乕僩儔儖抣乮愝掕屻乯偺曐懚応強偼丒丒丒 俤俤俹俼俷俵偺愭摢侾僶僀僩栚乮ADDRESS丗0乯偵丄嵟戝抣乮俀俆俆乯撪偱奿擺偝傟偰傑偡丅 ---------------------------------------------------------------------------------- 仭俹俬俠偵慻傒崬傫偩捈屻偺弶婜忬懺偱偡丅
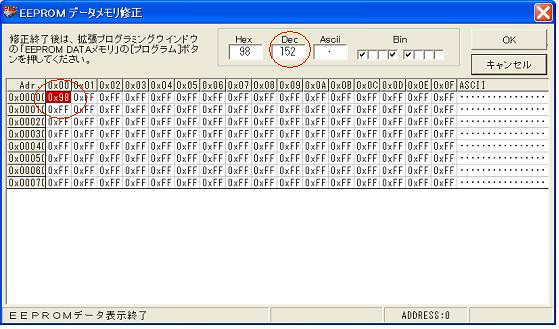
丂仺丂抣偼丄嵟戝抣偺俀俆俆乮俢倕們丗侾侽恑悢乯偱偡丅 ---------------------------------------------------------------------------------- 仭憲怣婡乮庤摦憖嶌乯偱偺僯儏乕僩儔儖愝掕屻偺忬懺偱偡丅 丒僯儏乕僩儔儖埵抲偼丒丒丒亂 僗僥僀僢僋丗僙儞僞乕 亃亂 僩儕儉丗僙儞僞乕 亃偱偡丅
丂仺丂僯儏乕僩儔儖愝掕偝傟偨抣偼丄侾俆俀乮俢倕們丗侾侽恑悢乯偱偡丅
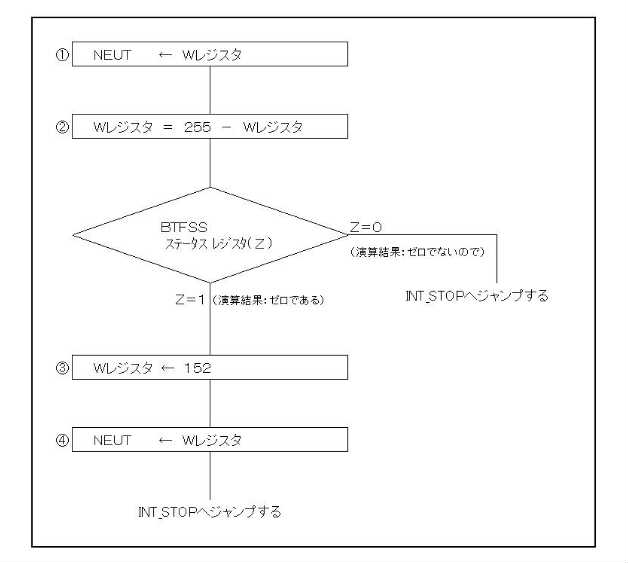
仠僯儏乕僩儔儖乮徣棯抣乯愝掕偺僼儘乕恾偱偡丅
乮張棟奣梫乯 偙偺張棟偼丄僯儏乕僩儔儖愝掕偺擖椡偑丄侾夞傕柍偐偭偨応崌乮俹俬俠彂崬傒帪偺弶婜忬懺 俀俆俆亖倃'俥俥'乯偵尷傝丄僯儏乕僩儔儖拞棫埵抲偺徣棯抣乮俢'侾俆俀'乯傪巊梡偝偣傞丅 仭梫斲學悢偺愝掕 嘆偙偺帪揰偱偺倂儗僕僗僞偵偼丄俤俤俹俼俷俵偐傜撉崬傑傟偨抣乮愝掕嵪僯儏乕僩儔儖抣乯 丂偑奿擺偝傟偰偄偰丄偙偺抣傪俶俤倀俿乮愝掕嵪僯儏乕僩儔儖抣乯偵奿擺偡傞丅 嘇俹俬俠彂崬傒帪偺弶婜忬懺抣乮俀俆俆亖倃'俥俥'乯傪婎弨偵偟偰丄倂儗僕僗僞偵奿擺偝傟 丂偰偄傞抣乮俤俤俹俼俷俵偐傜偺乯偱堷偒嶼偟偰丄偙偺墘嶼寢壥偺僗僥乕僞僗儗僕僗僞乮倅 丂價僢僩乯偺抣偵傛傝丄徣棯抣揔梡偺梫斲傪敾抐偝偣傞丅 仭徣棯抣揔梡偺梫斲敾抐 丒僗僥乕僞僗儗僕僗僞乮倅價僢僩乯亖 侽丒丒丒 墘嶼寢壥丗僛儘偱側偄偺偱 丂仺丂梫斲學悢崁栚偑丄摍偟偔柍偄帠偵側傞偺偱丄壗傕偣偢偵丄師偺張棟傊僕儍儞僾偡傞丅 丒僗僥乕僞僗儗僕僗僞乮倅價僢僩乯亖 侾丒丒丒 墘嶼寢壥丗僛儘偱偁傞 丂仺丂梫斲學悢崁栚偑丄摍偟偄帠偵側傞偺偱丄徣棯抣偺愝掕傪峴偆丅 仭徣棯抣偺愝掕 嘊倂儗僕僗僞偵丄僯儏乕僩儔儖拞棫埵抲偺徣棯抣乮俢'侾俆俀'乯傪奿擺偡傞丅 嘋俶俤倀俿乮愝掕嵪僯儏乕僩儔儖抣乯偵丄倂儗僕僗僞偺抣乮忋婰嘊乯傪奿擺偡傞丅 丒師偺張棟傊僕儍儞僾偡傞丅
仠捛婰偟偨僾儘僌儔儉僗僥僢僾偱偡丅 MOVWF NEUT ;俶俤倀俿丂丂仼丂倂儗僕僗僞 ;---僯儏乕僩儔儖抣乮俶俤倀俿乯偺徣棯抣乮侾俆俀乯傪僙僢僩偡傞 SUBLW D'255' ;倂儗僕僗僞 亖 俀俆俆乮俫'俥俥'乯亅 倂儗僕僗僞 BTFSS STATUS,Z ;矫袄节嫁嚼(Z)亖侾乮墘嶼寢壥丗僛儘偱偁傞乯 ;師偺柦椷傪僗僉僢僾偡傞 GOTO INT_STOP ;矫袄节嫁嚼(Z)亖侽乮墘嶼寢壥丗僛儘偱側偄偺偱乯 ;INT_STOP傊丂僕儍儞僾偡傞 MOVLW D'152' ;倂儗僕僗僞丂仼丂侾俆俀乮徣棯抣乯 MOVWF NEUT ;俶俤倀俿丂丂仼丂倂儗僕僗僞 GOTO INT_STOP ;INT_STOP傊丂僕儍儞僾偡傞
偪傚偭偲丄庤敳偒懳墳側姶偠偑偟傑偡偑丒丒丒 (^^丟
丒 丒 丒 丒 丒
仠僗僺乕僪僐儞僩儘乕儔乕丂俵俹係俀侾俀搵嵹丂亂俠宆亃帋峴僾儘僌儔儉偱偡丅 仭僯儏乕僩儔儖埵抲丒丒丒亂 僗僥僀僢僋丗僙儞僞乕 亃亂 僩儕儉丗僙儞僞乕 亃 丂丂------------------------------------------------------------------------------ 丂丂丒俽俹俠俠俇侽侽侽乮 倁俤俼 俠俇侽.侽 乯丂俇.侽倁儌乕僞梡丂婎杮斉 丂丂丂丂乮丂嵟戝弌椡揹埑丂丒慜恑帪丗俇丏侽倁丂丒屻恑帪丗亅俇丏侽倁丂乯 丂丂------------------------------------------------------------------------------ 儌乕僞乕僐儞僩儘乕儖俬俠偼丄係倁嬱摦懳墳偩偑丒丒丒丂俇倁弌椡偱傕戝忎晇偐偟傜(^^丠
懠儌乕僞乕梡偺僾儘僌儔儉偵傕丄僯儏乕僩儔儖偺徣棯抣傪愝掕偡傞傛偆偵偟傑偟偨丅 丂丂------------------------------------------------------------------------------ 丂丂丒俽俹俠俠侾俆侽侽乮 倁俤俼 俠侾俆.侽 乯丂侾.俆倁儌乕僞梡丂婎杮斉 丂丂丂丂乮丂嵟戝弌椡揹埑丂丒慜恑帪丗侾丏俆倁丂丒屻恑帪丗亅侾丏俆倁丂乯 丂丂------------------------------------------------------------------------------ 丂丂丒俽俹俠俠俁侽侽侽乮 倁俤俼 俠俁侽.侽 乯丂俁.侽倁儌乕僞梡丂婎杮斉 丂丂丂丂乮丂嵟戝弌椡揹埑丂丒慜恑帪丗俁丏侽倁丂丒屻恑帪丗亅俁丏侽倁丂乯 丂丂------------------------------------------------------------------------------ 丂丂丒俽俹俠俠係俆侽侽乮 倁俤俼 俠係俆.侽 乯丂係.俆倁儌乕僞梡丂婎杮斉 丂丂丂丂乮丂嵟戝弌椡揹埑丂丒慜恑帪丗係丏係倁丂丒屻恑帪丗亅係丏係倁丂乯 丂丂------------------------------------------------------------------------------ 丂丂丒俽俹俠俠俆侽侽侽乮 倁俤俼 俠俆侽.侽 乯丂俆.侽倁儌乕僞梡丂婎杮斉 丂丂丂丂乮丂嵟戝弌椡揹埑丂丒慜恑帪丗俆丏侽倁丂丒屻恑帪丗亅俆丏侽倁丂乯 丂丂------------------------------------------------------------------------------
丒 丒 丒 丒 丒